




PYSHELLSPEC is an advanced astrophysical tool for modeling of binary systems with circumstellar matter (e.g. accretion disk, jet, shell), computation of interferometric observables |V2|, arg T3, |T3|, |dV|, arg dV, comparison of light curves, spectro-interferometry, spectra, and SED with observations, and both global and local optimisation of system parameters. It is based on Shellspec, a long-characteristic LTE radiation transfer code by Budaj & Richards (2004).
If you use this code, please cite the original references:
M. Brož, D. Mourard, J. Budaj, P. Harmanec, H. Schmitt, I. Tallon-Bosc, D. Bonneau et al., Optically thin medium in β Lyr A system, A&A 645, A51, 2021.
D. Mourard, M. Brož, J. Nemravová, P. Harmanec, J. Budaj, F. Baron, J.D. Monnier et al., Physical properties of β Lyr A and its opaque accretion disk, A&A 618, A112, 2018.
The authors are Jana Nemravová and M. Brož, as described in the Changelog. The latest version of Pyshellspec, together with preprints of the respective papers, can be downloaded right here:
pyshellspec_20171207.tar.gz ... the actual version used in the paper pyterpol_20170728.tar.gz ... synthetic spectra generated by Pyterpol data_20171126.tar.gz ... observational data of β Lyr A fitting_nebula_LINES__103233.tar.gz ... example of a 'nebula' model fitting_spot_LIMCOF__102005.tar.gz ... example of a 'slab+spot' model Mourard_etal_2018_1807.04789.pdf ... Mourard et al. (2018) paper data_20200611_GOODPHI.tar.gz ... new observational data pyshellspec_20200409_EFFBAND.tar.gz ... new Pyshellspec version pyterpol_20191030_NEWPHOENIX.tar.gz ... new Pyterpol data fitting_shell8_20200611__17.tar.gz ... new model alternative_models.tar.gz ... alternative models (from Tab. 2) betalyr2_twocolumn.pdf ... Brož et al. (rv1.) paper pyshellspec3_20220828_JONAK.tar.gz ... Pyshellspec for Python3 pyterpoldata_20220111_PYTHON3.tar.gz ... Pyterpol data, see Xitau for Pyterpol3 fitting_shell8_20220828_JONAK.tar.gz ... new model various_tests.tar.gz ... various tests
See the most recent vers. on [Github].
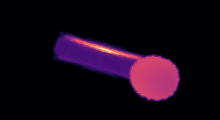
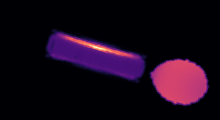
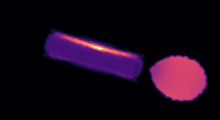
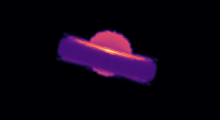
Best-fit animation for Hα wavelengths (new version):
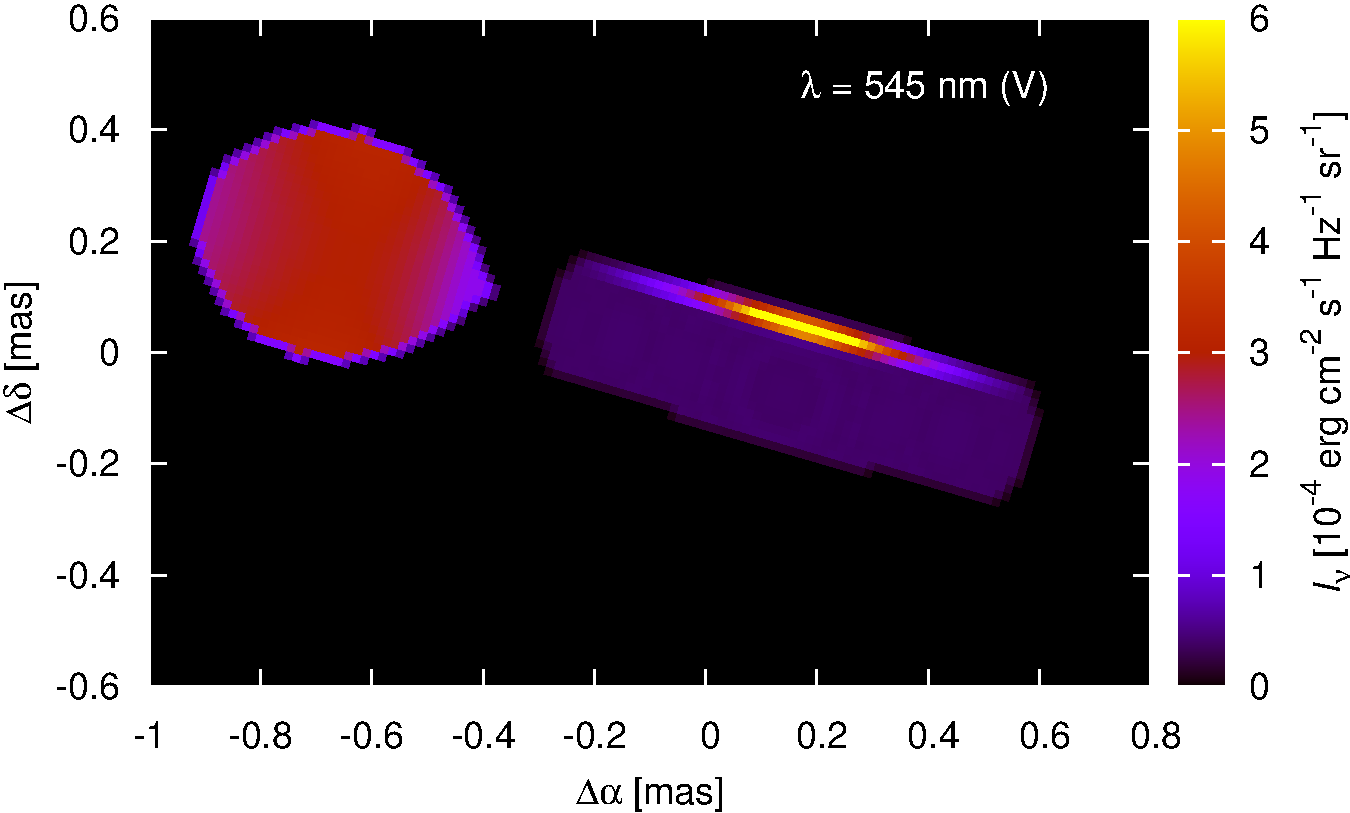
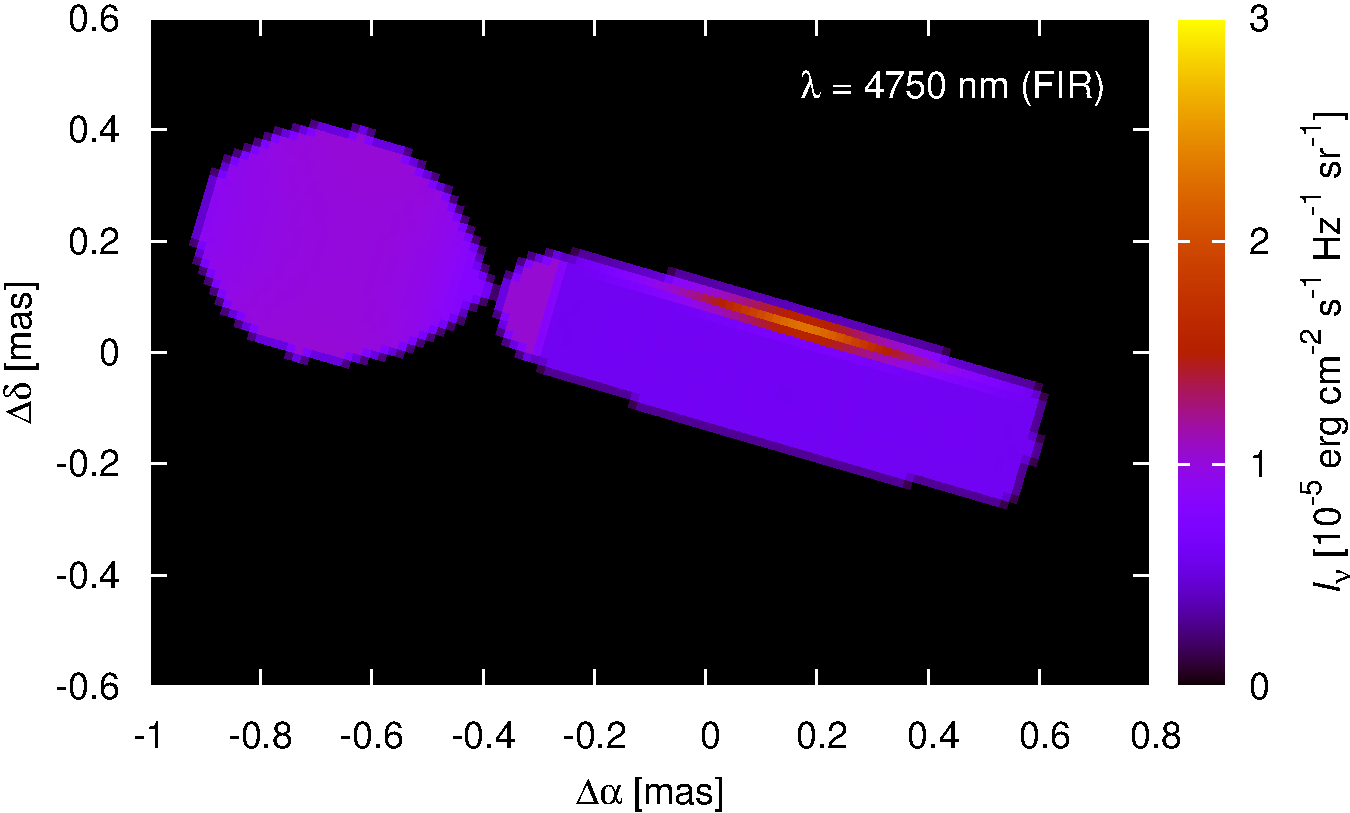
| Line-profile synthetic images of β Lyr A and spectra computed for the wavelength range of Hα, i.e., from 655.1 to 657.8 nm, at a fixed phase 0.25. Optically-thin components are clearly visible. The disk atmosphere appears first, because its Keplerian velocities close to the inner rim produce the blue-shifted wing. The jet inclined towards the observer appears second, with high velocities being projected to the line of sight. Finally, there is the spherical shell, with relatively low velocities spanning the core of Hα, which obscures other small-scale structures. For λ > 6563 Å, all objects disappear in a reverse order. See also hi-res version. |
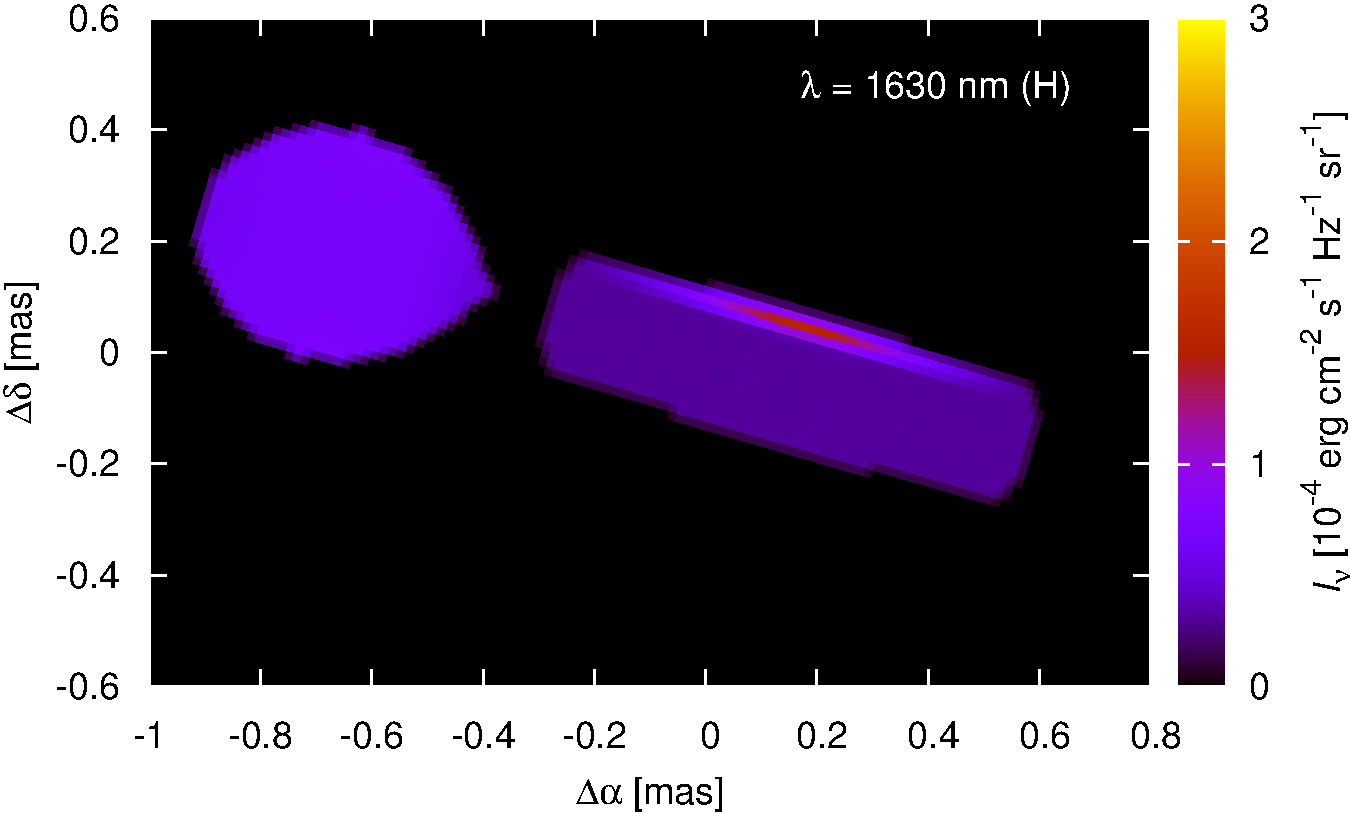
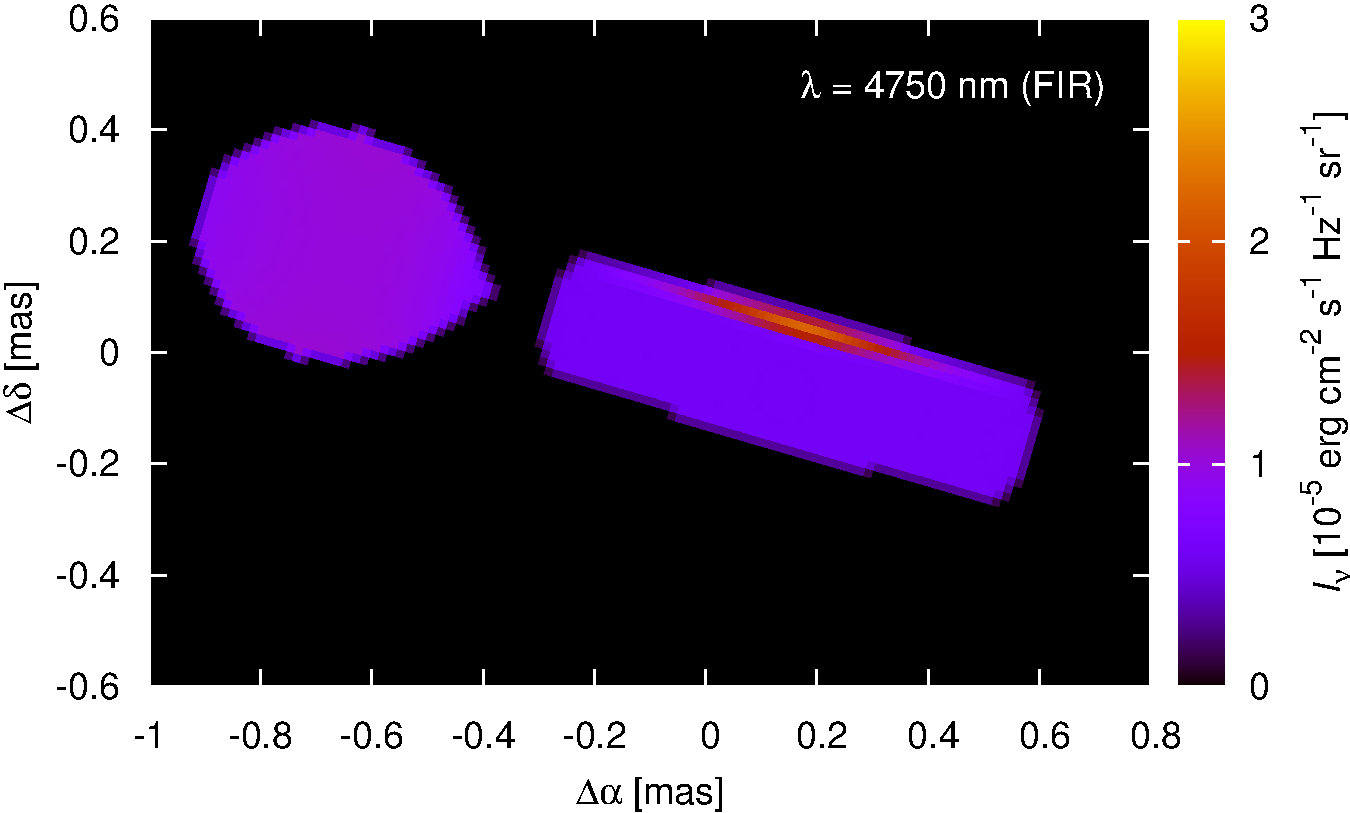
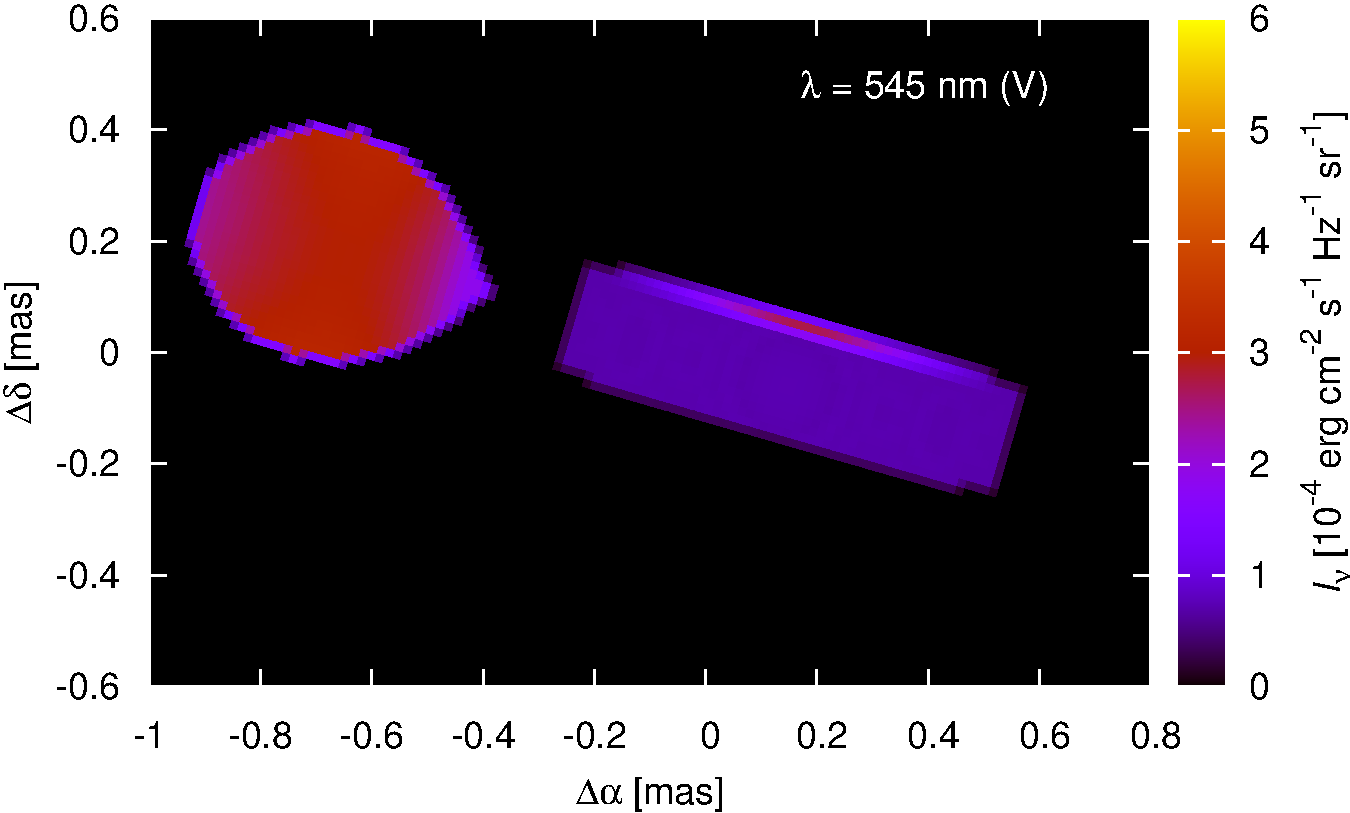
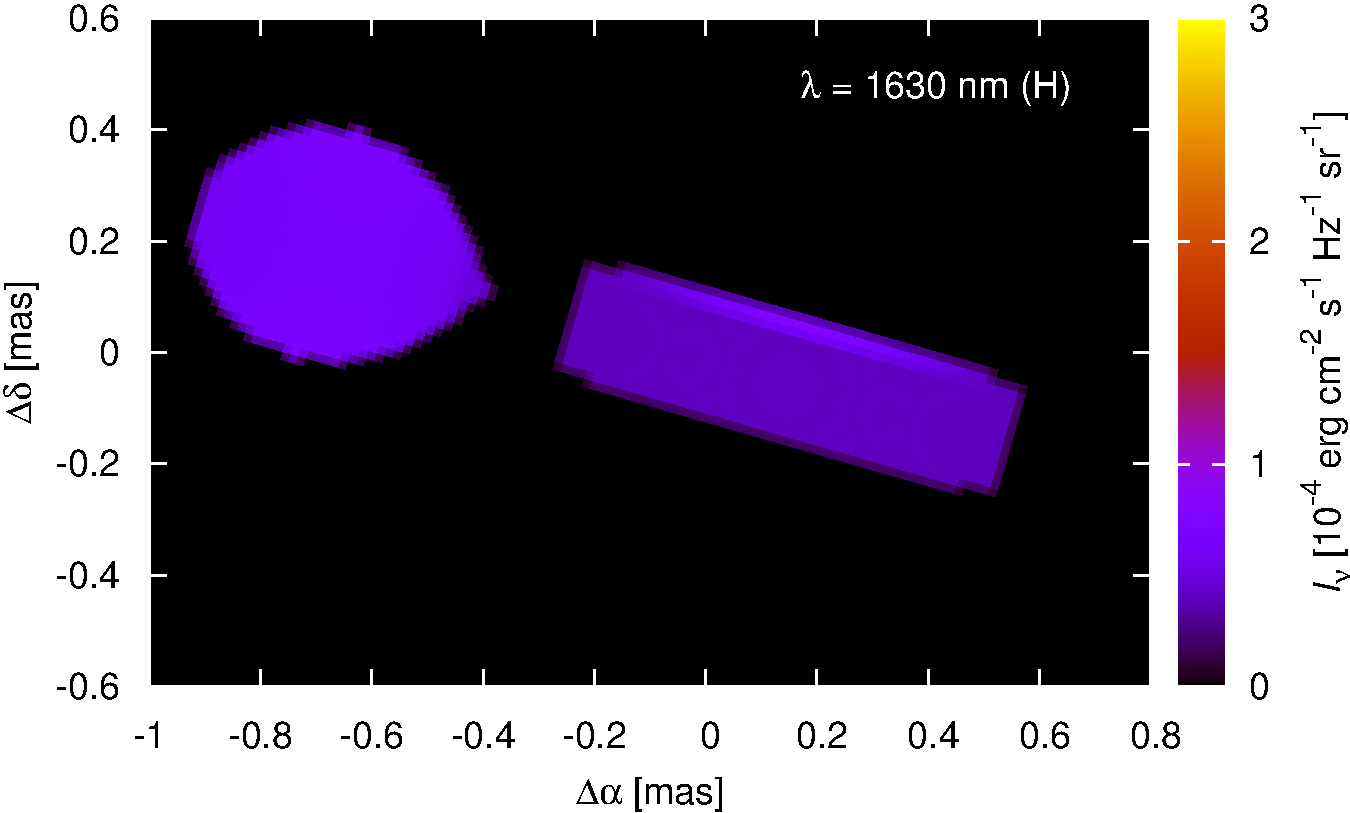
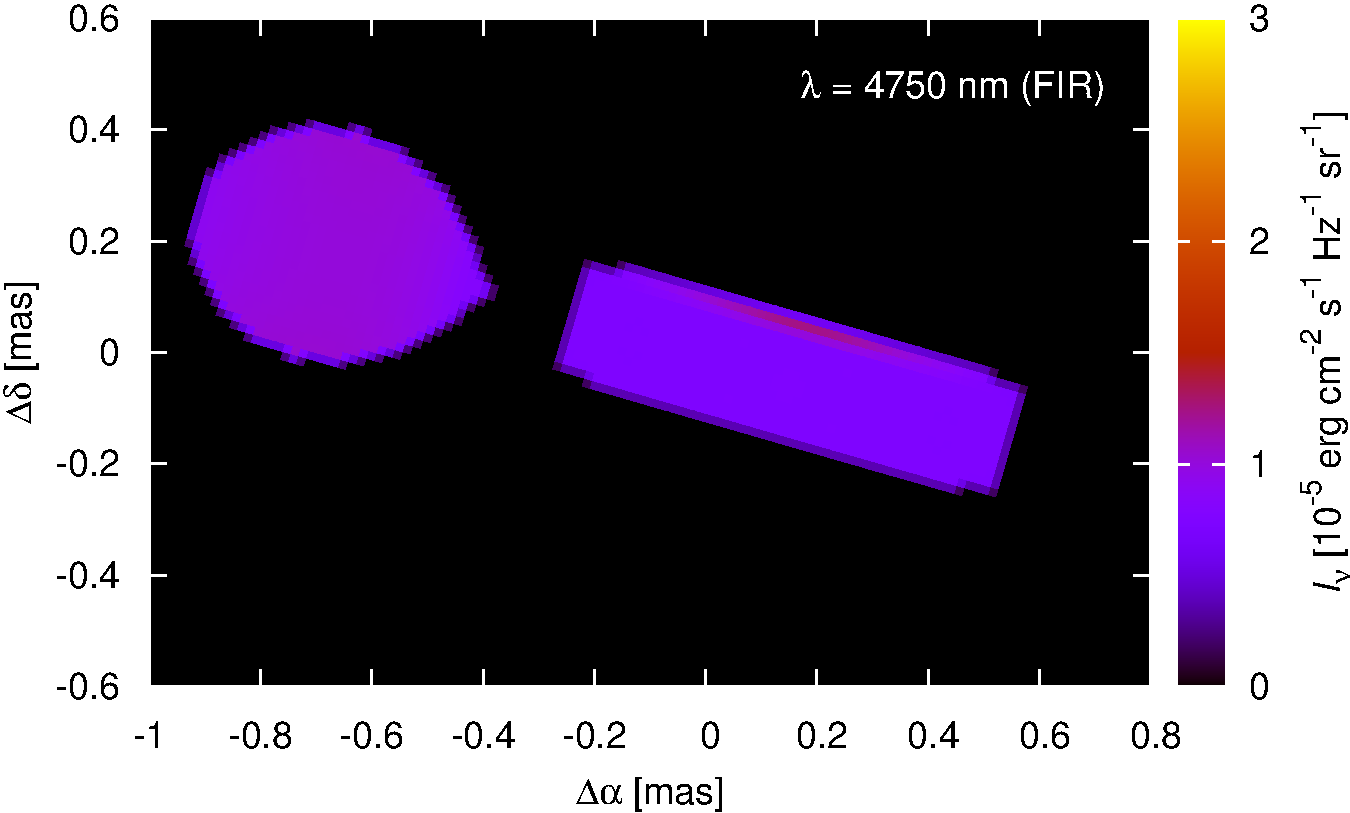
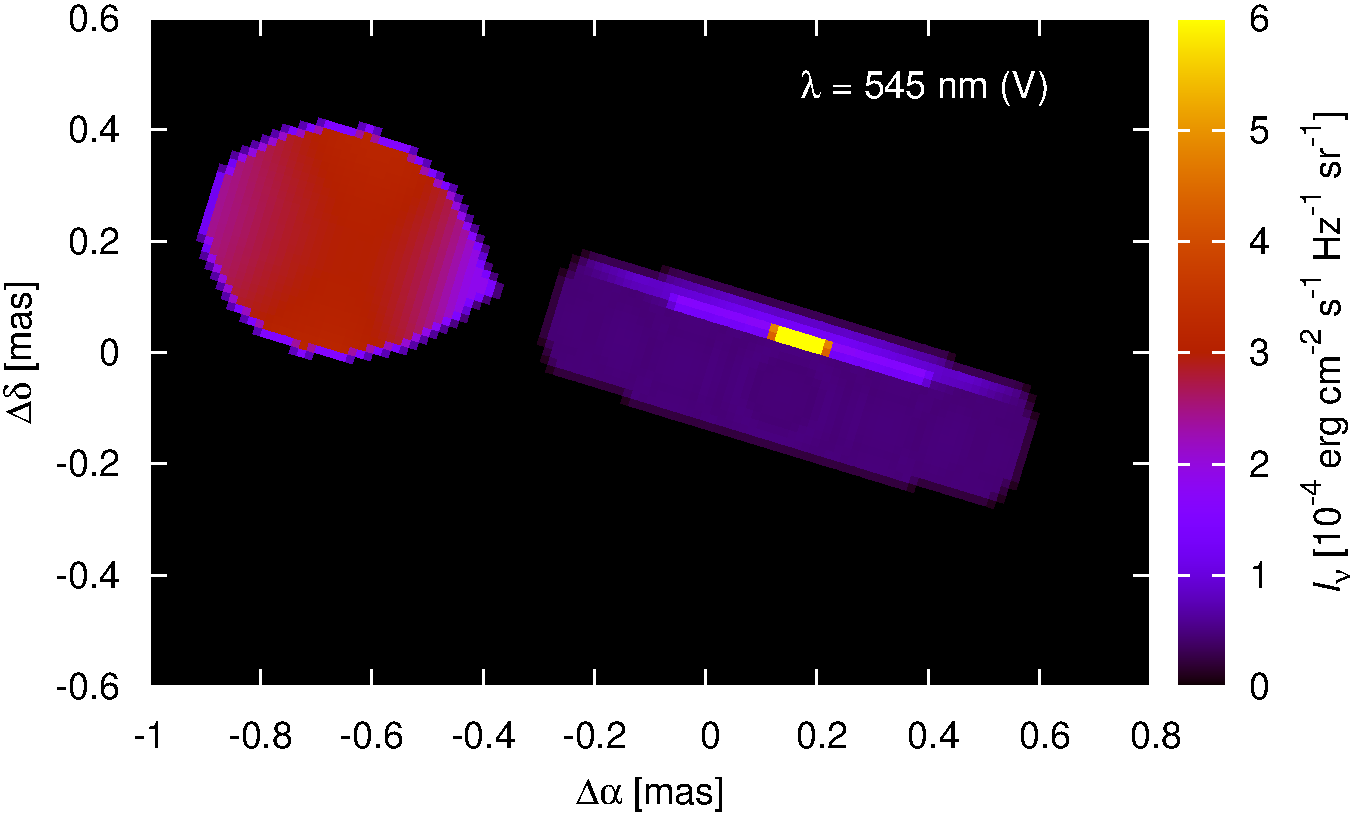
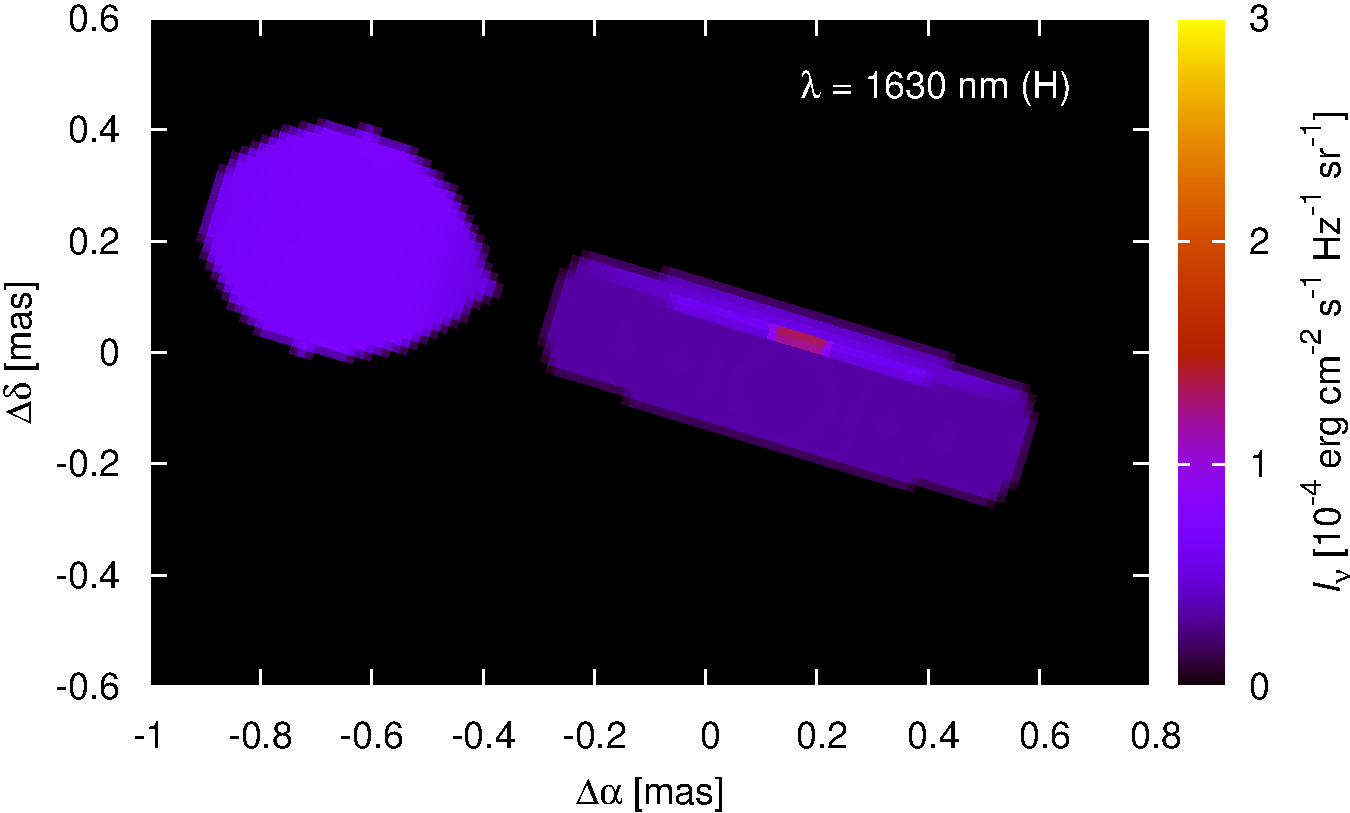
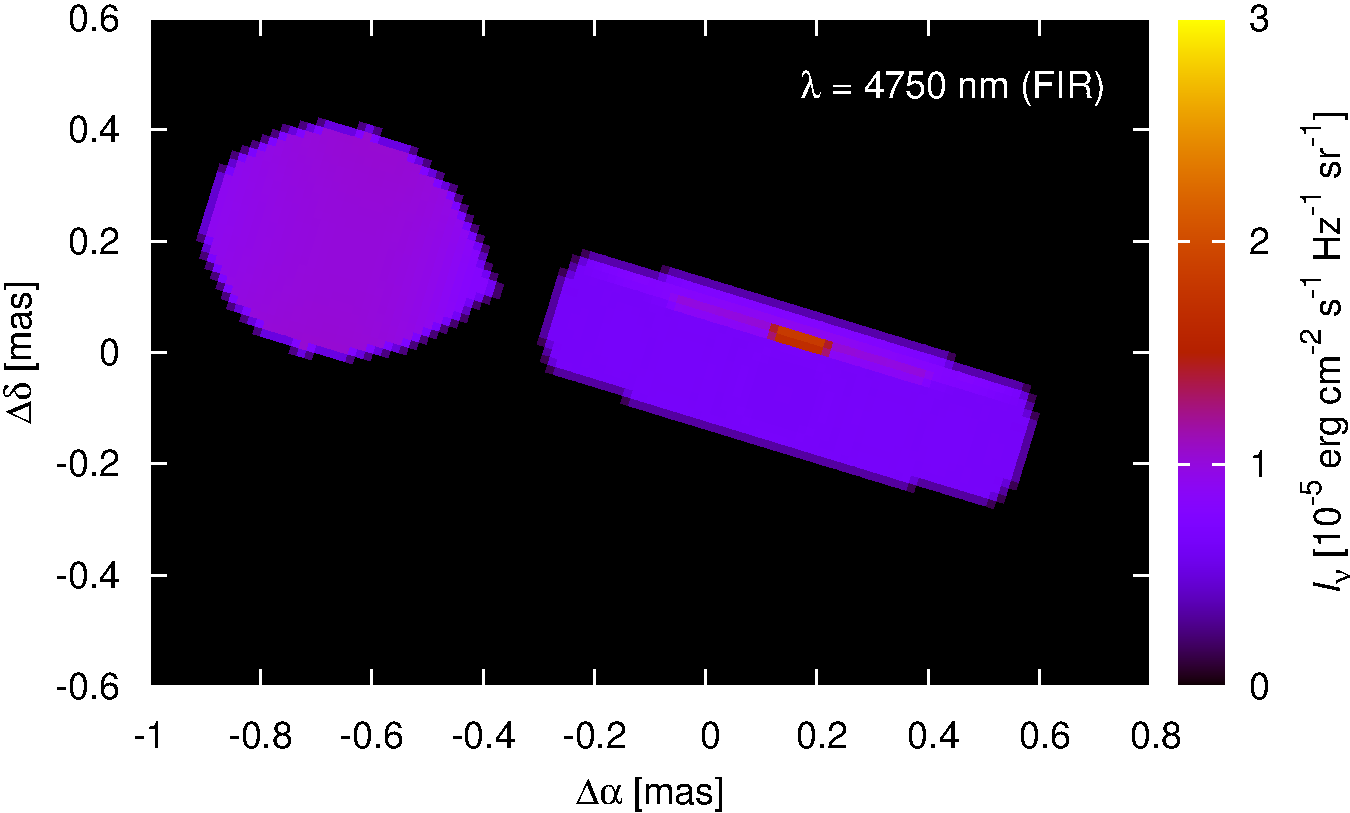
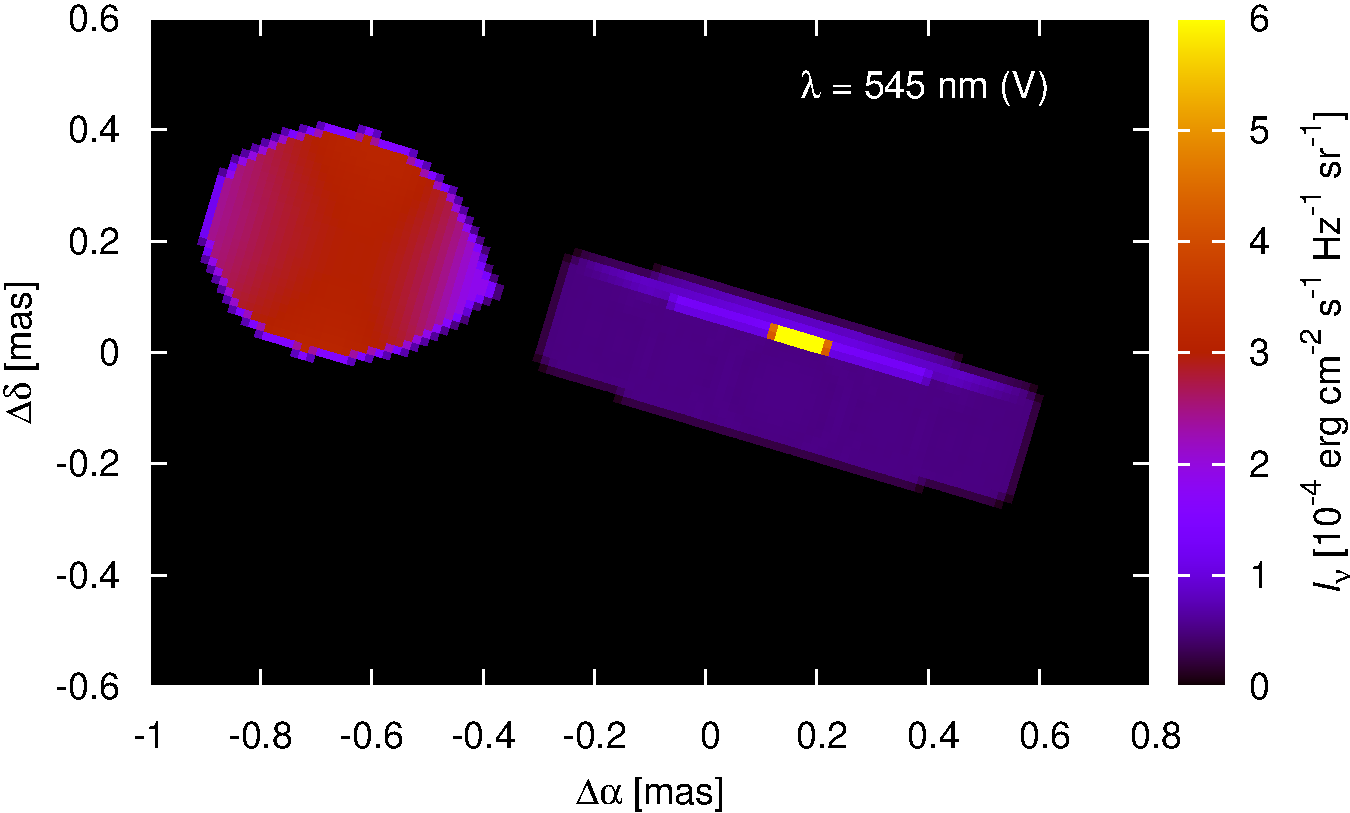
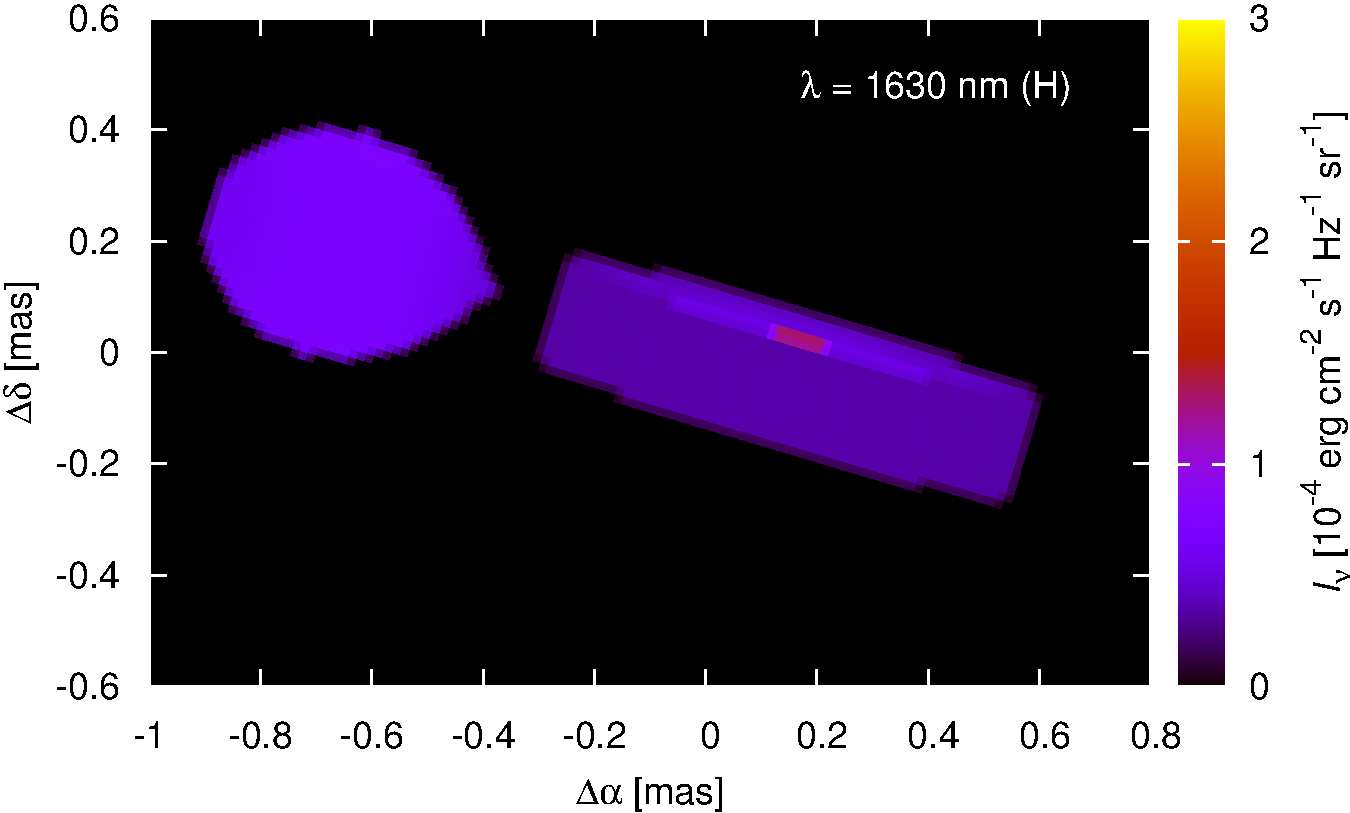
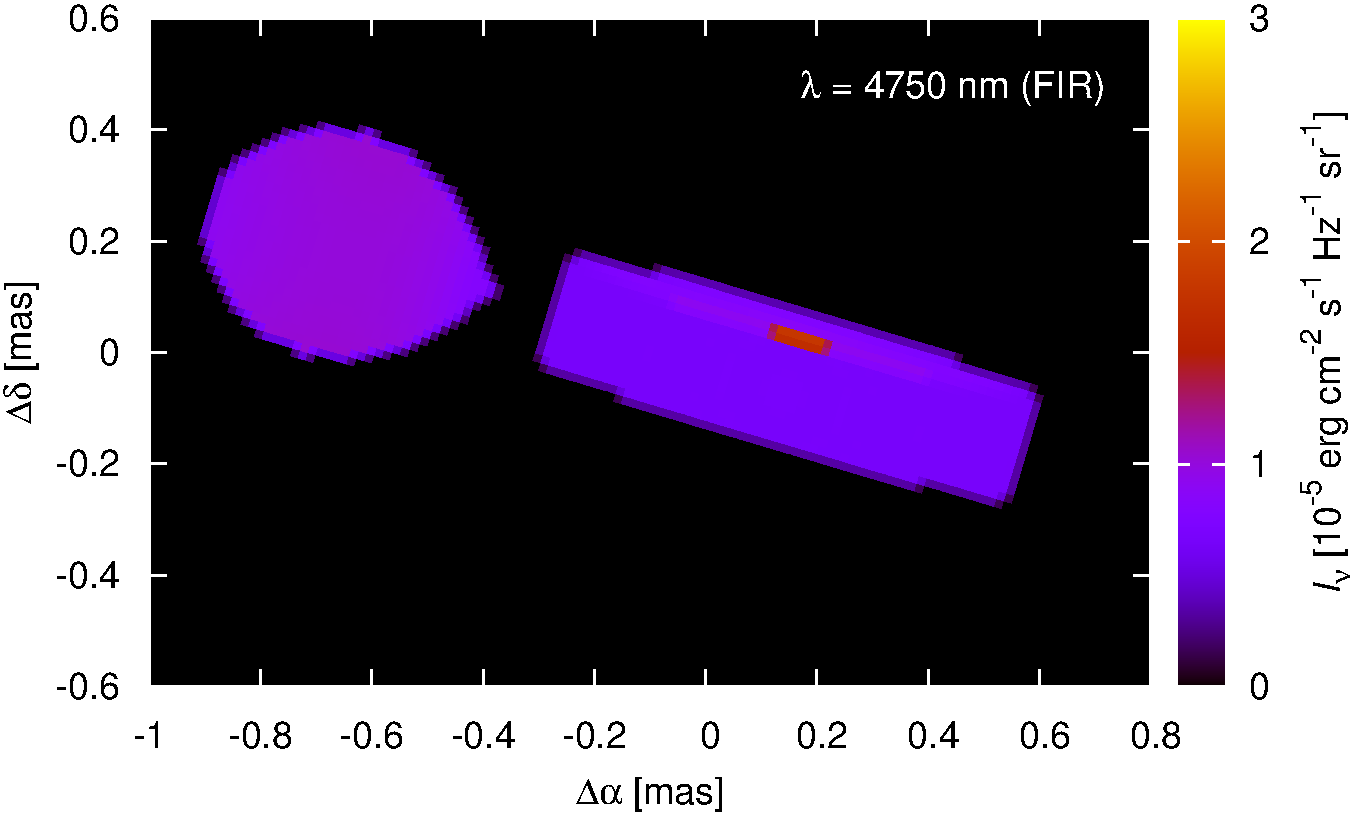
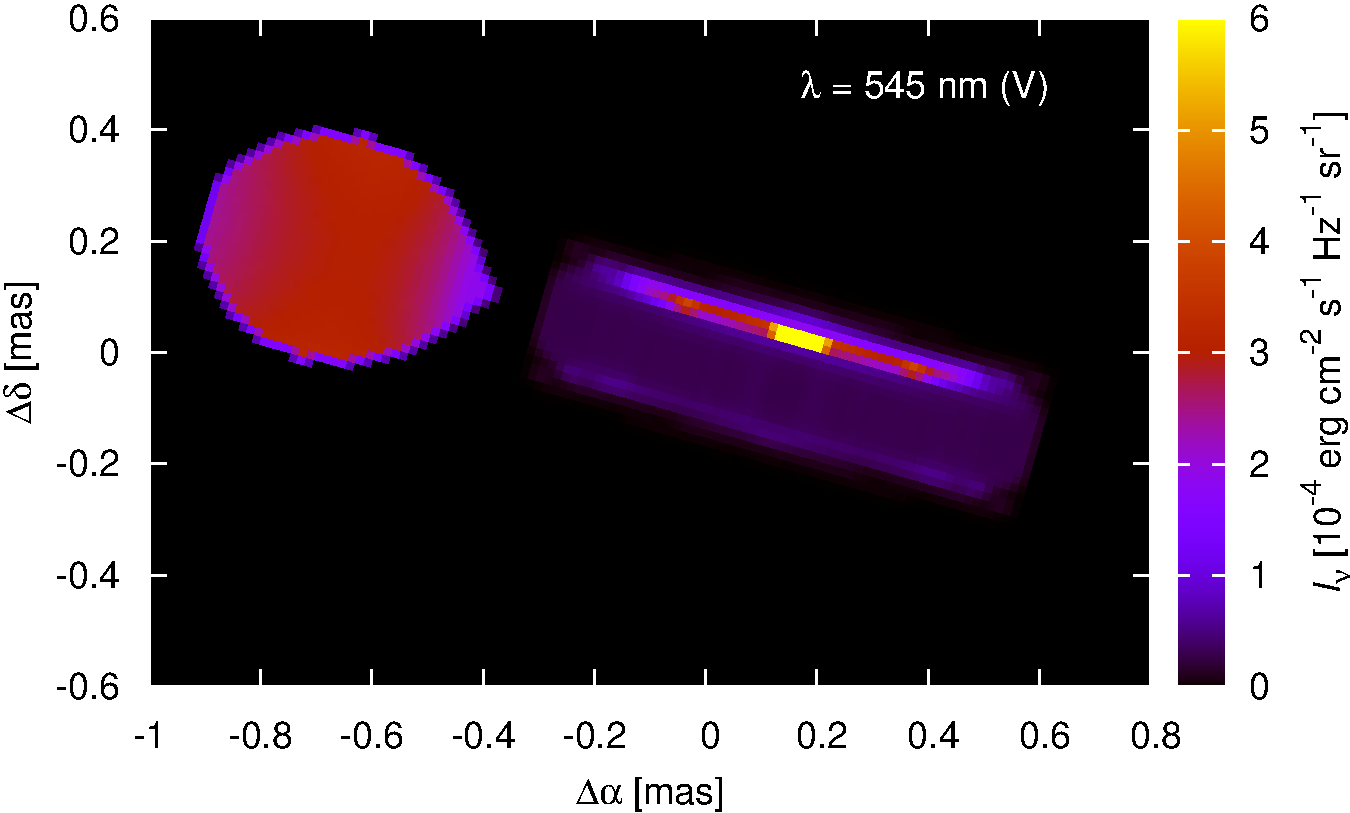
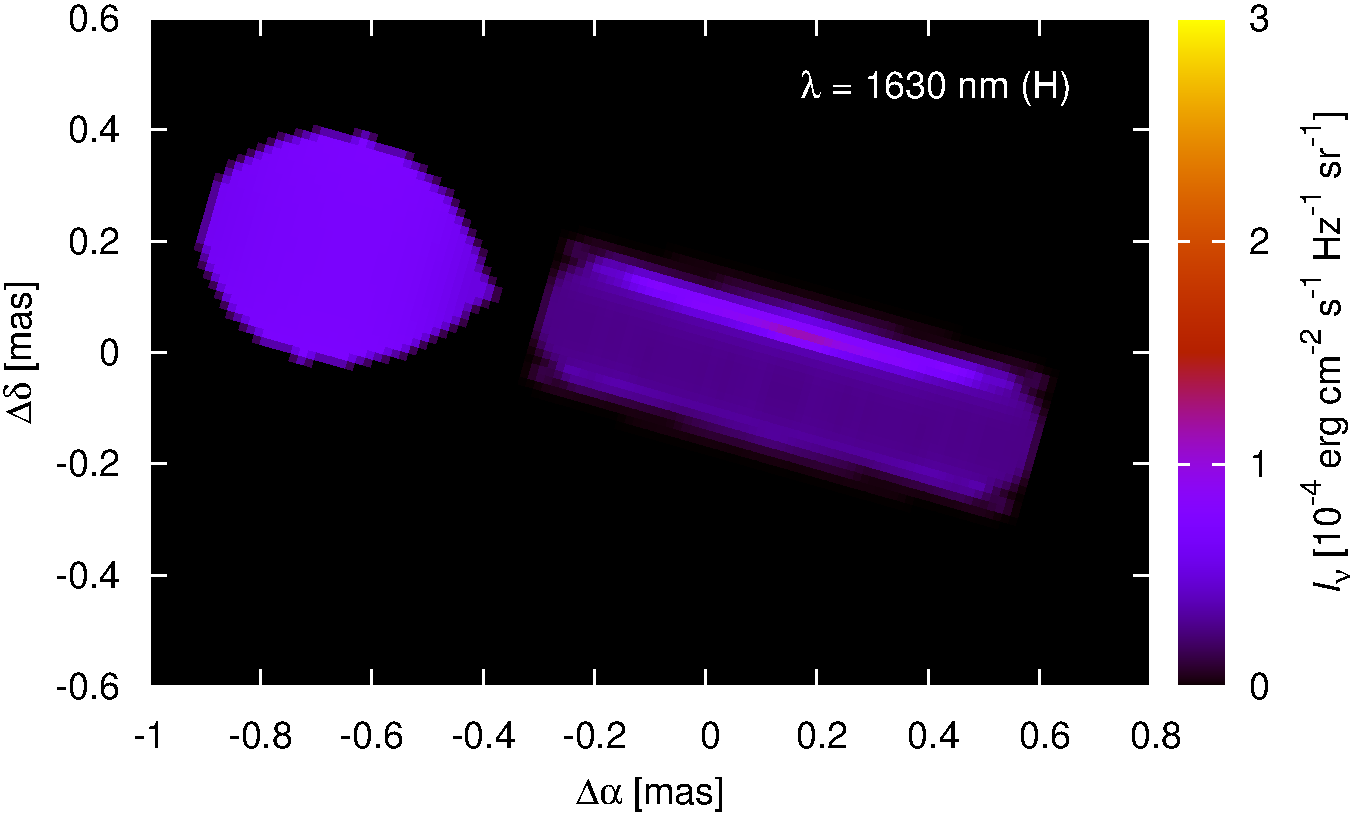
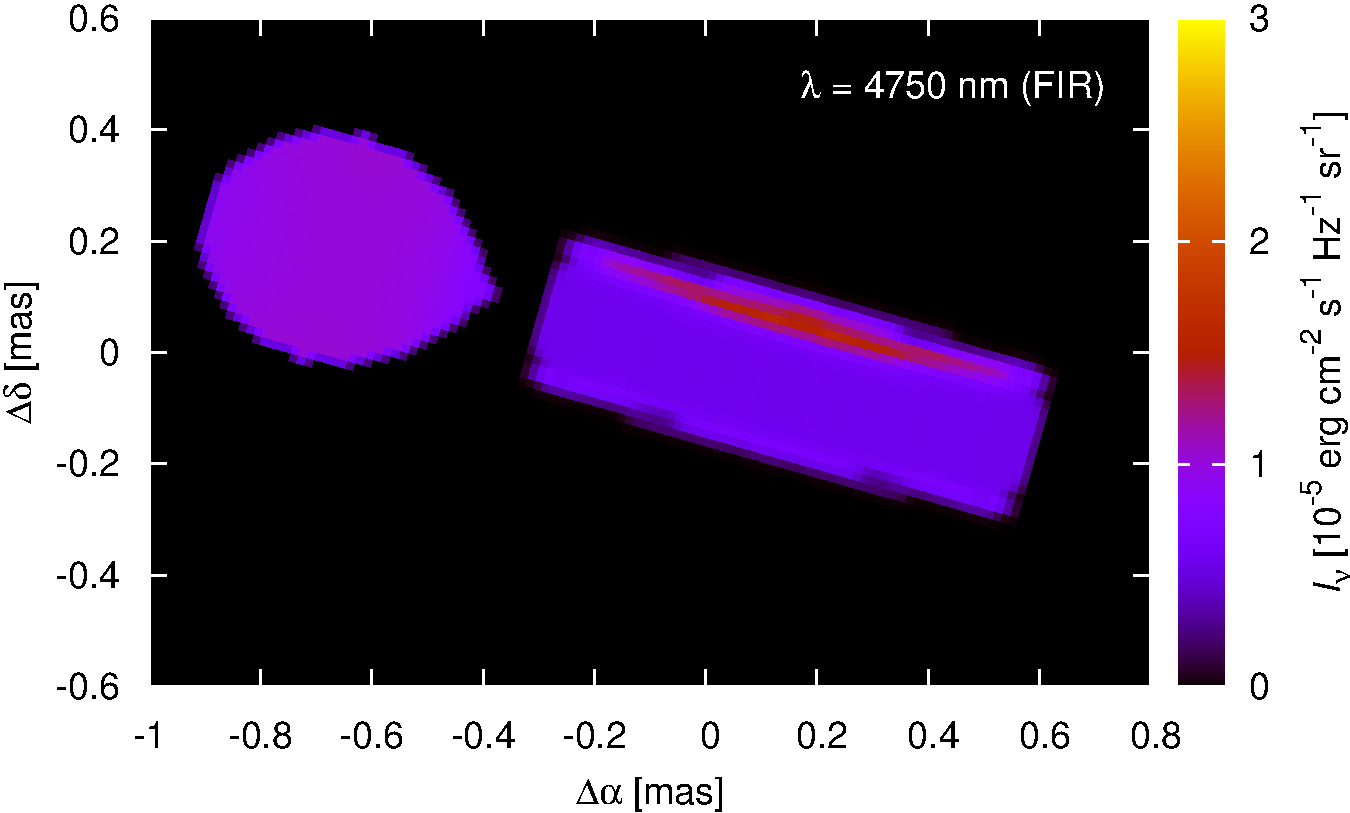
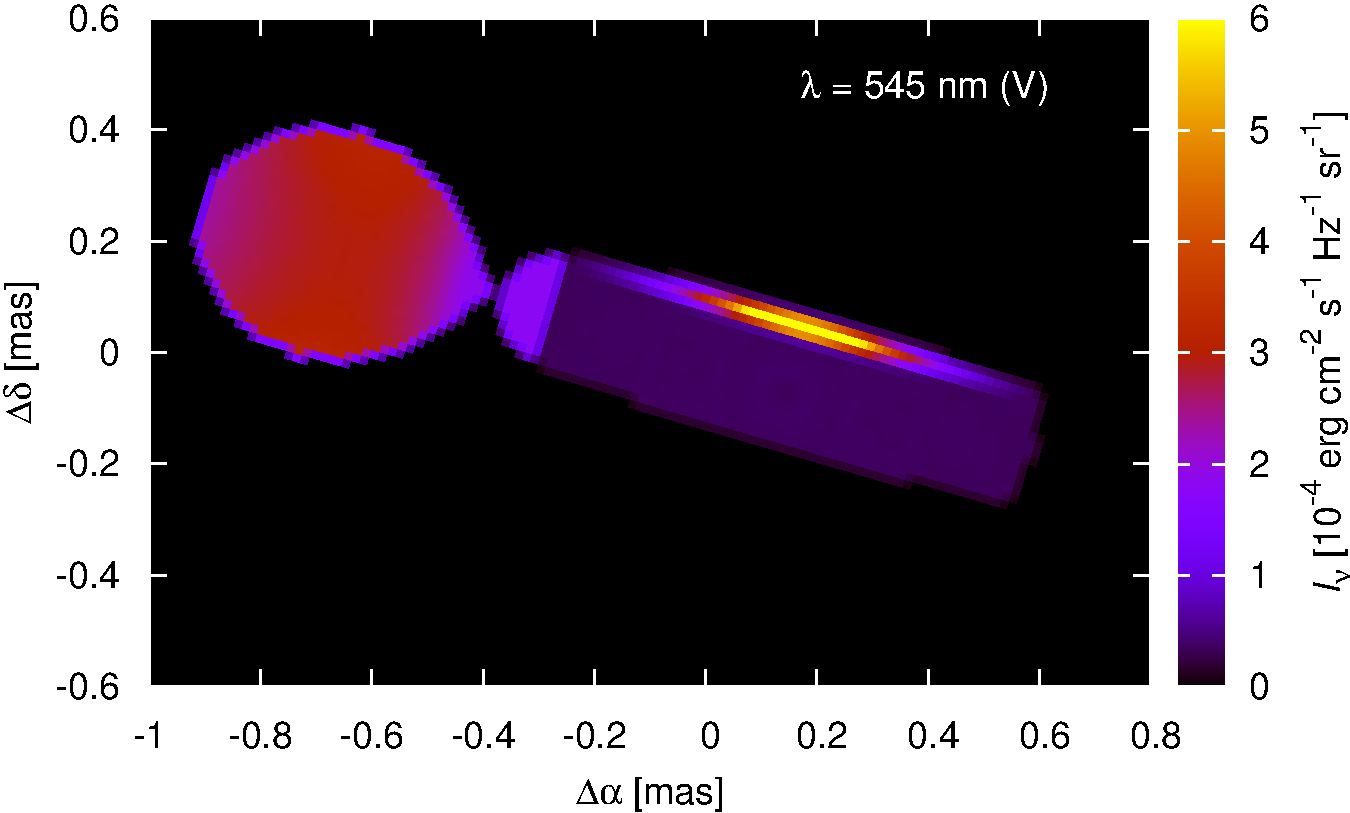
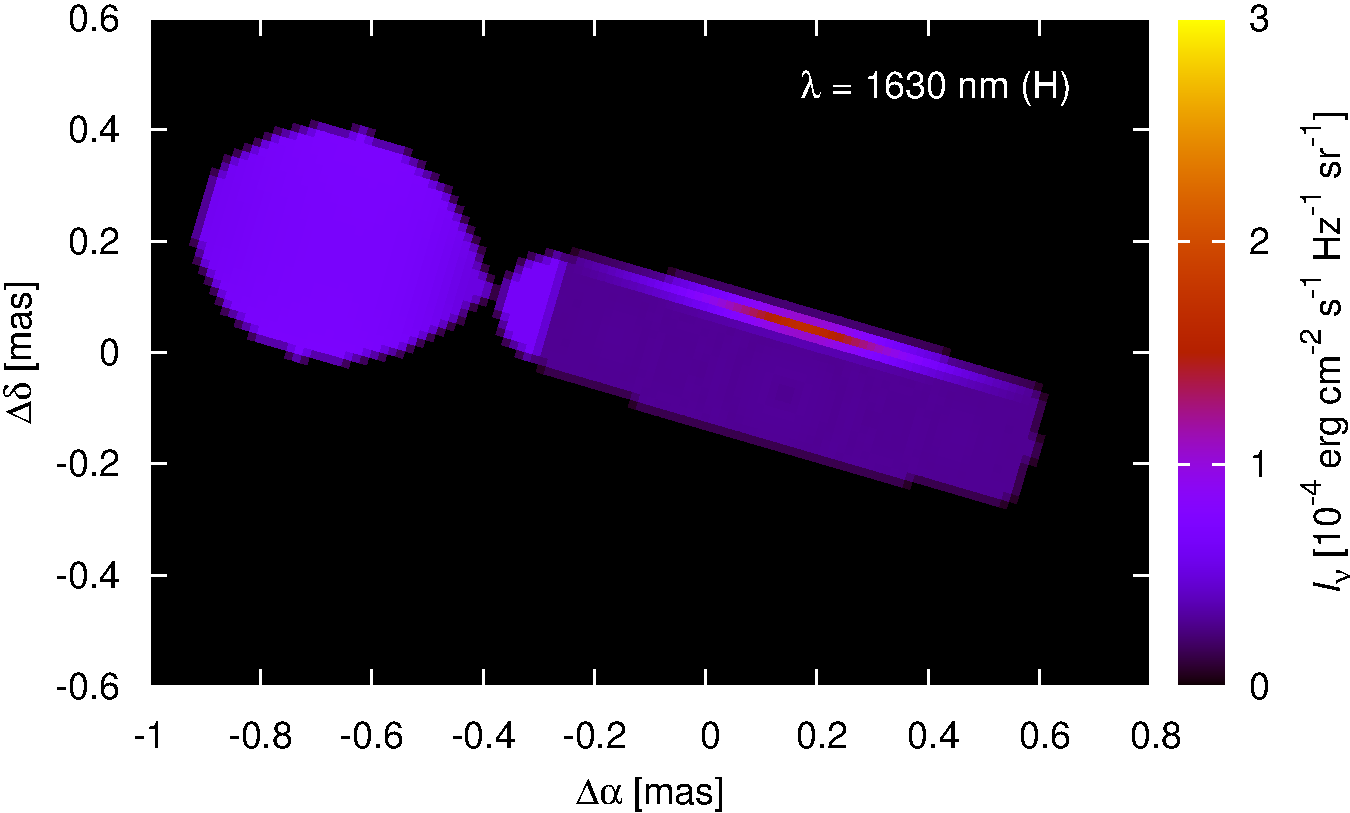
Best-fit images for 5 geometrical models (old version):
| FUV | V | NIR | FIR | |
| slab power-law | 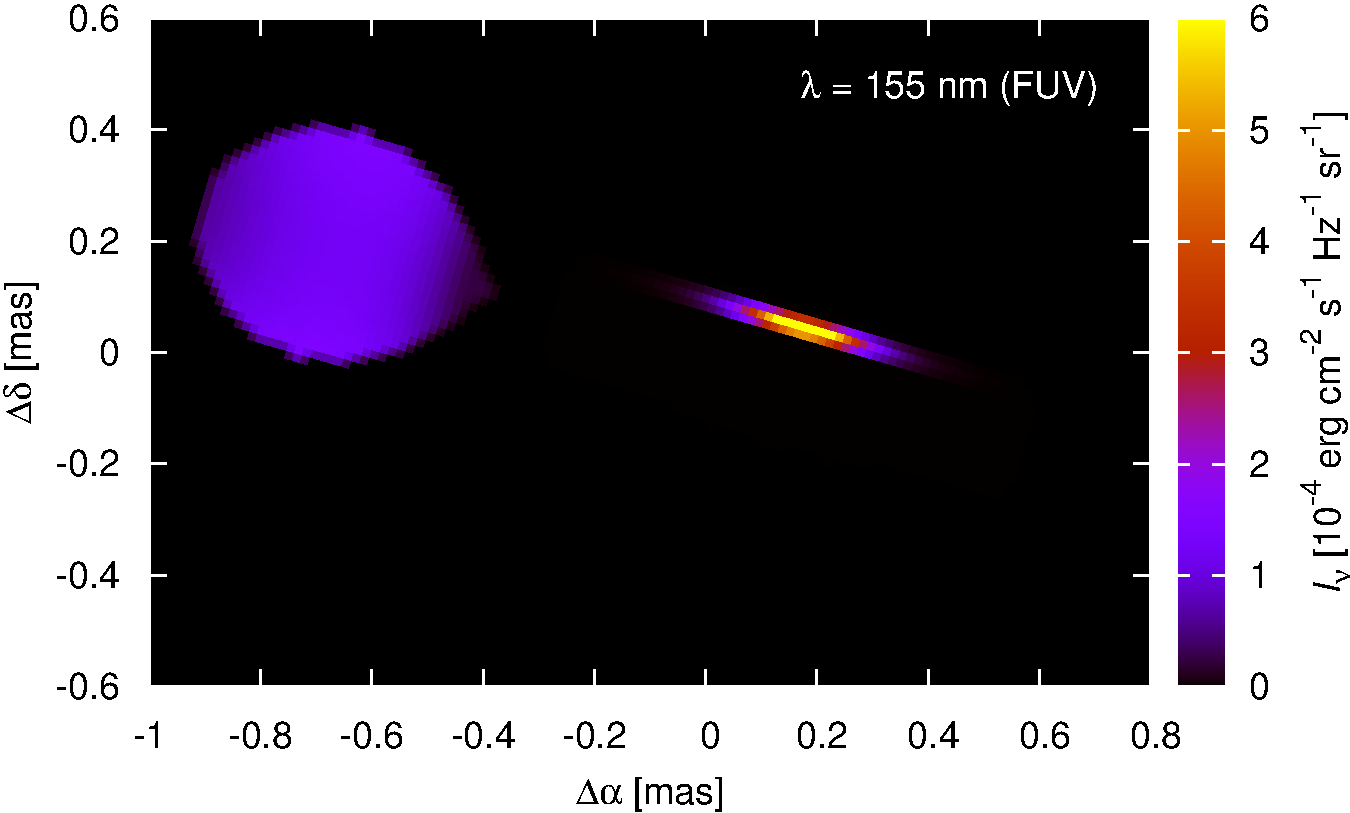 |
 |
 |
 |
| slab steady |  |
 |
 |
 |
| wedge power-law | 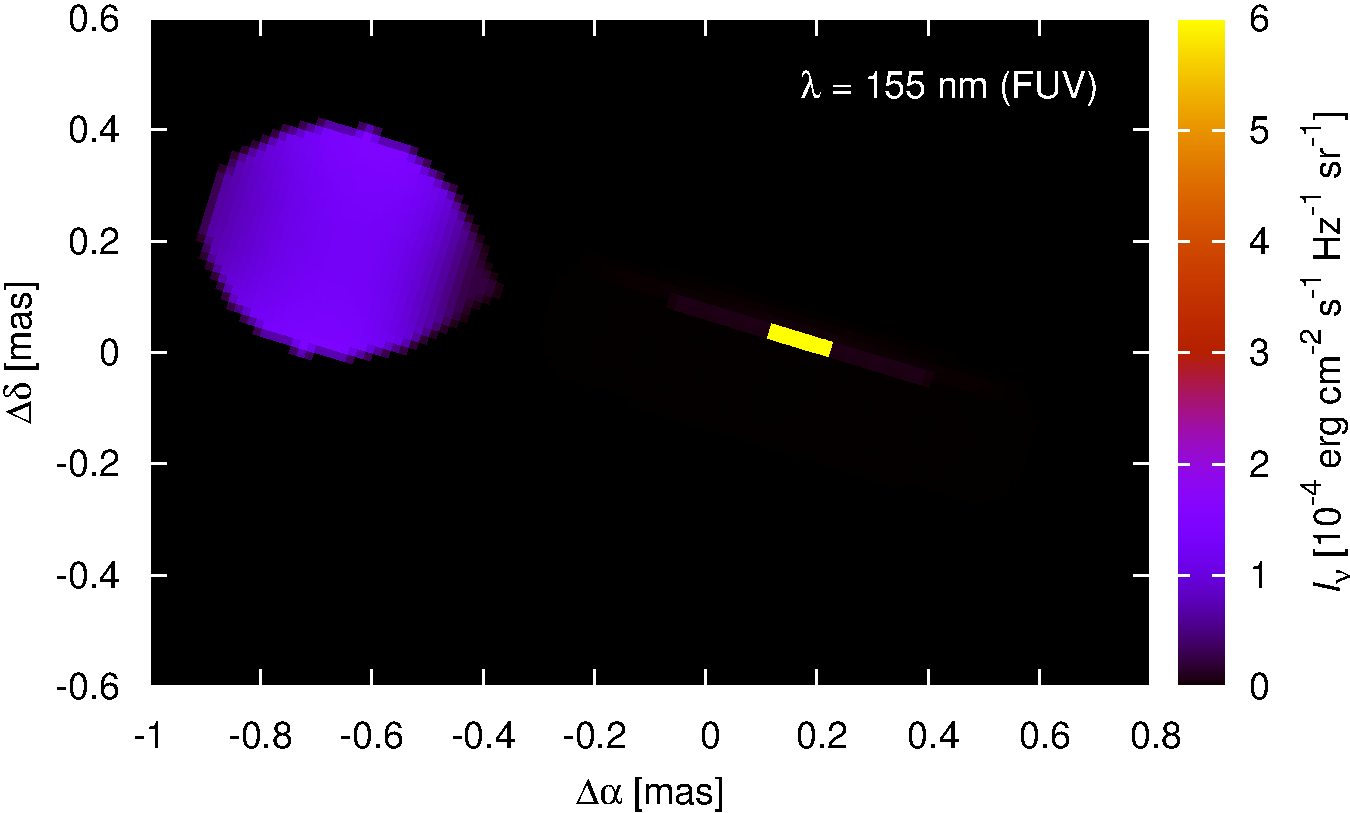 |
 |
 |
 |
| wedge steady | 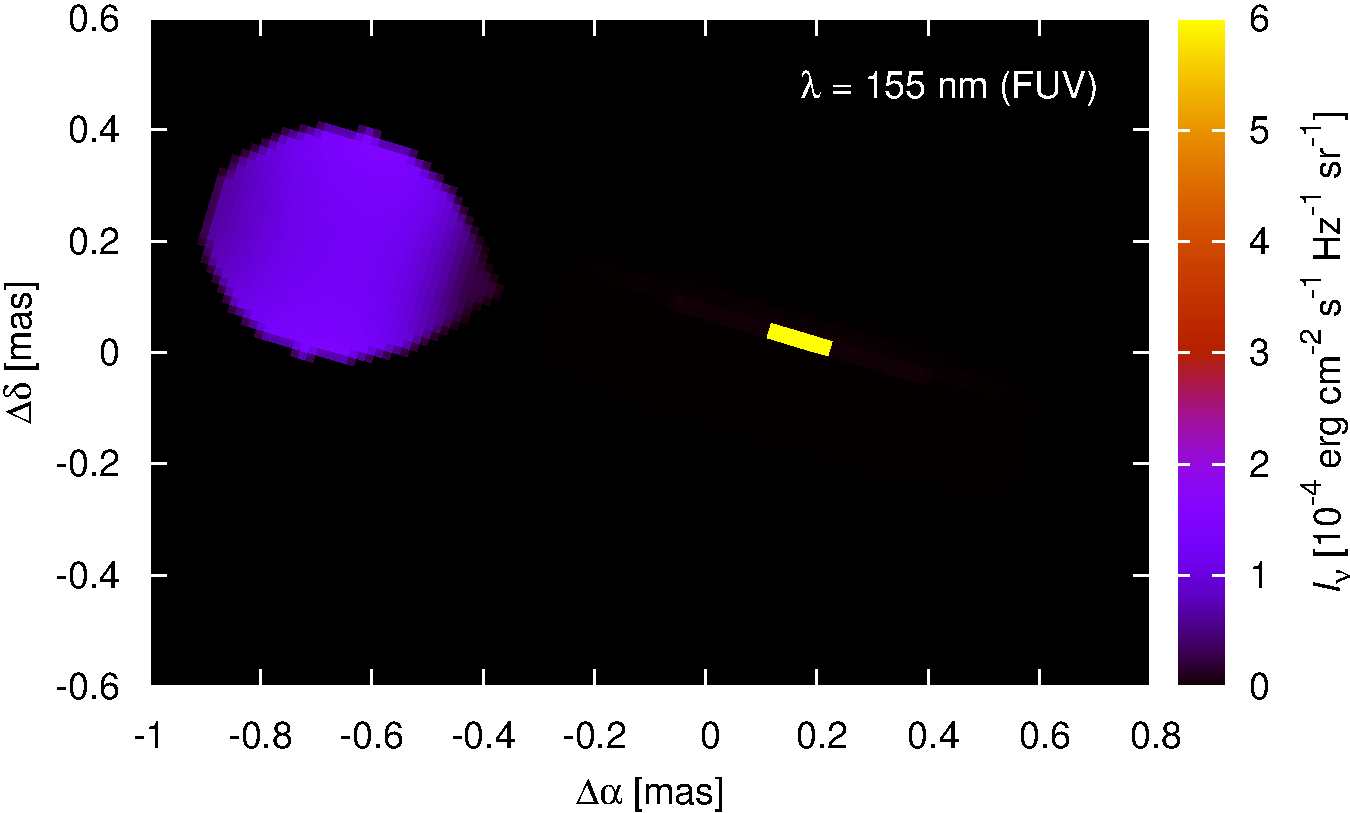 |
 |
 |
 |
| nebula LINES | 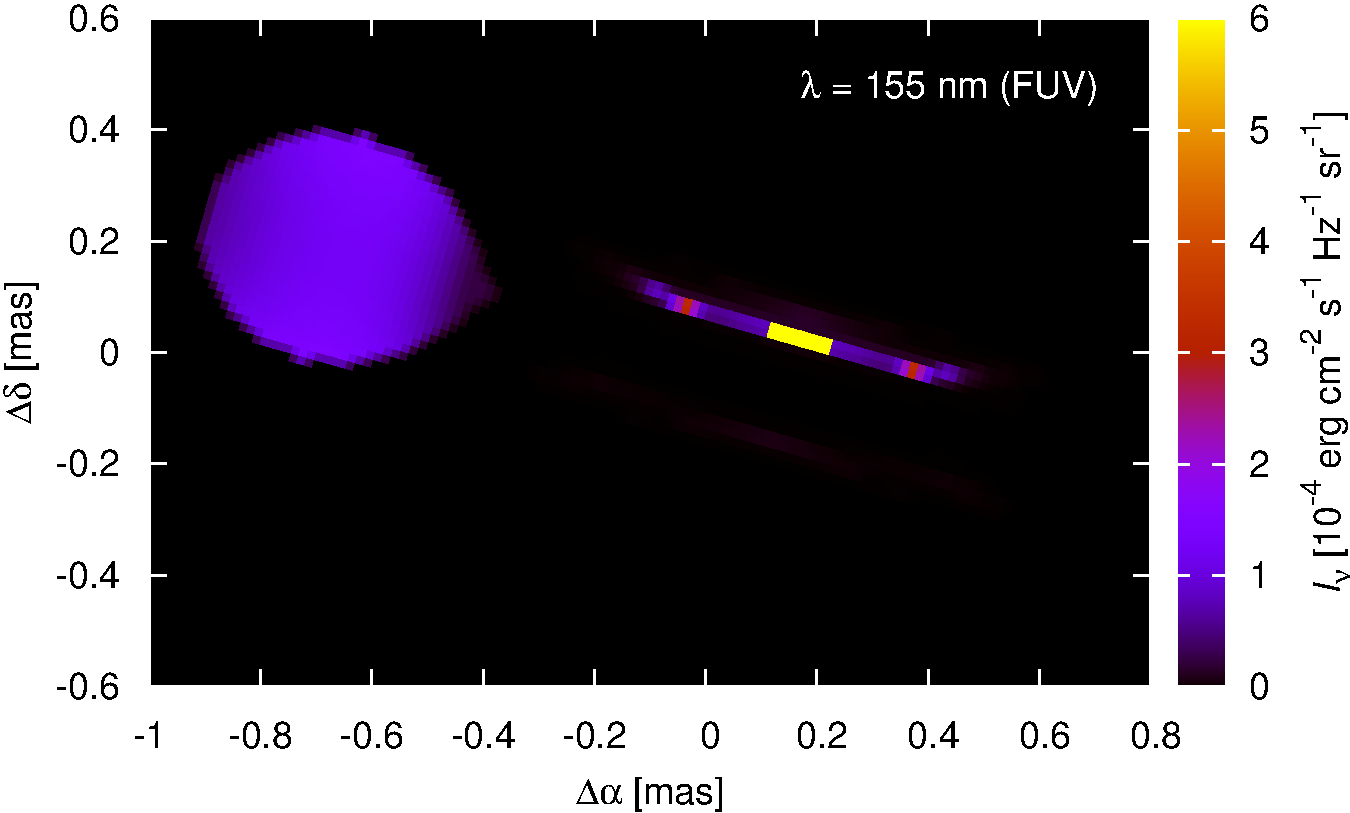 |
 |
 |
 |
| spot LIMCOF | 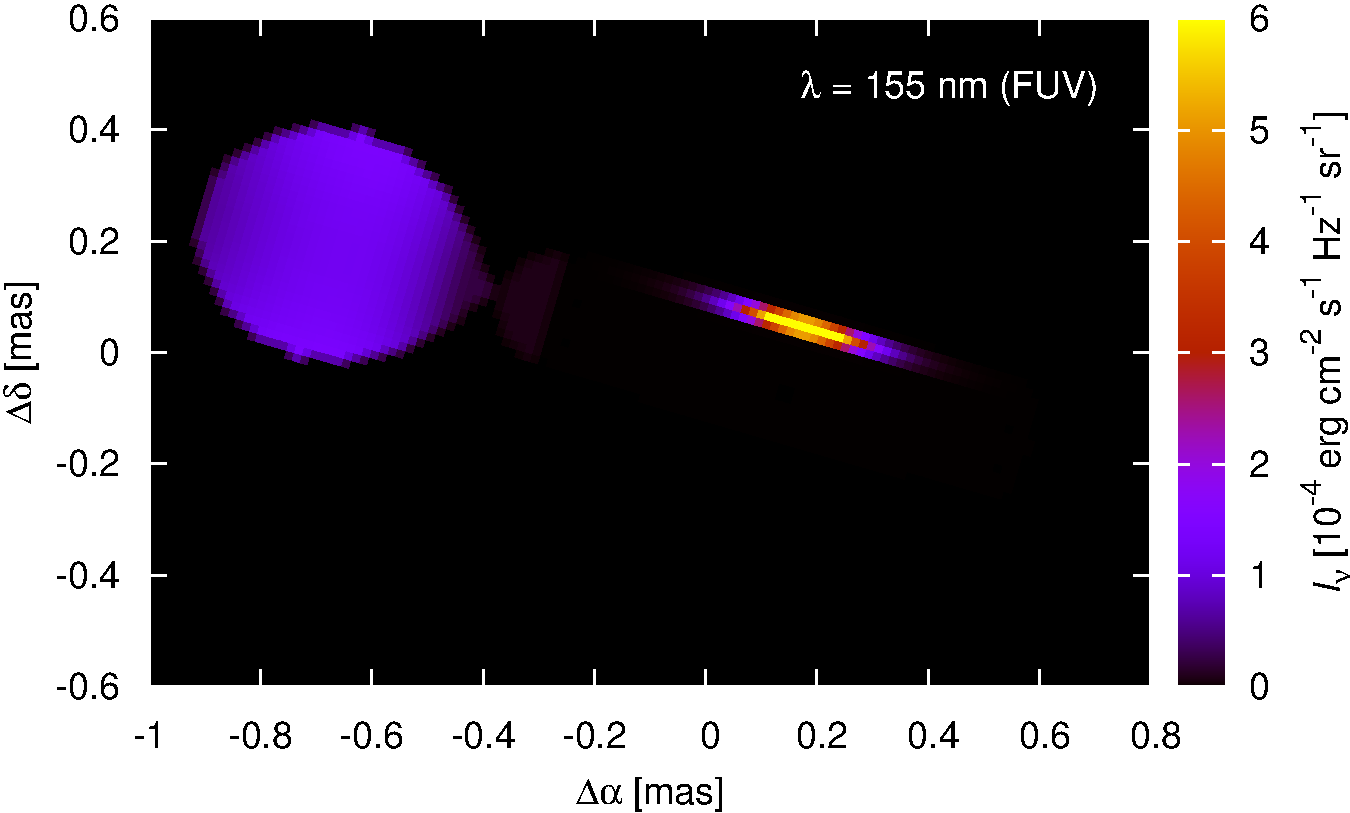 |
 |
 |
 |
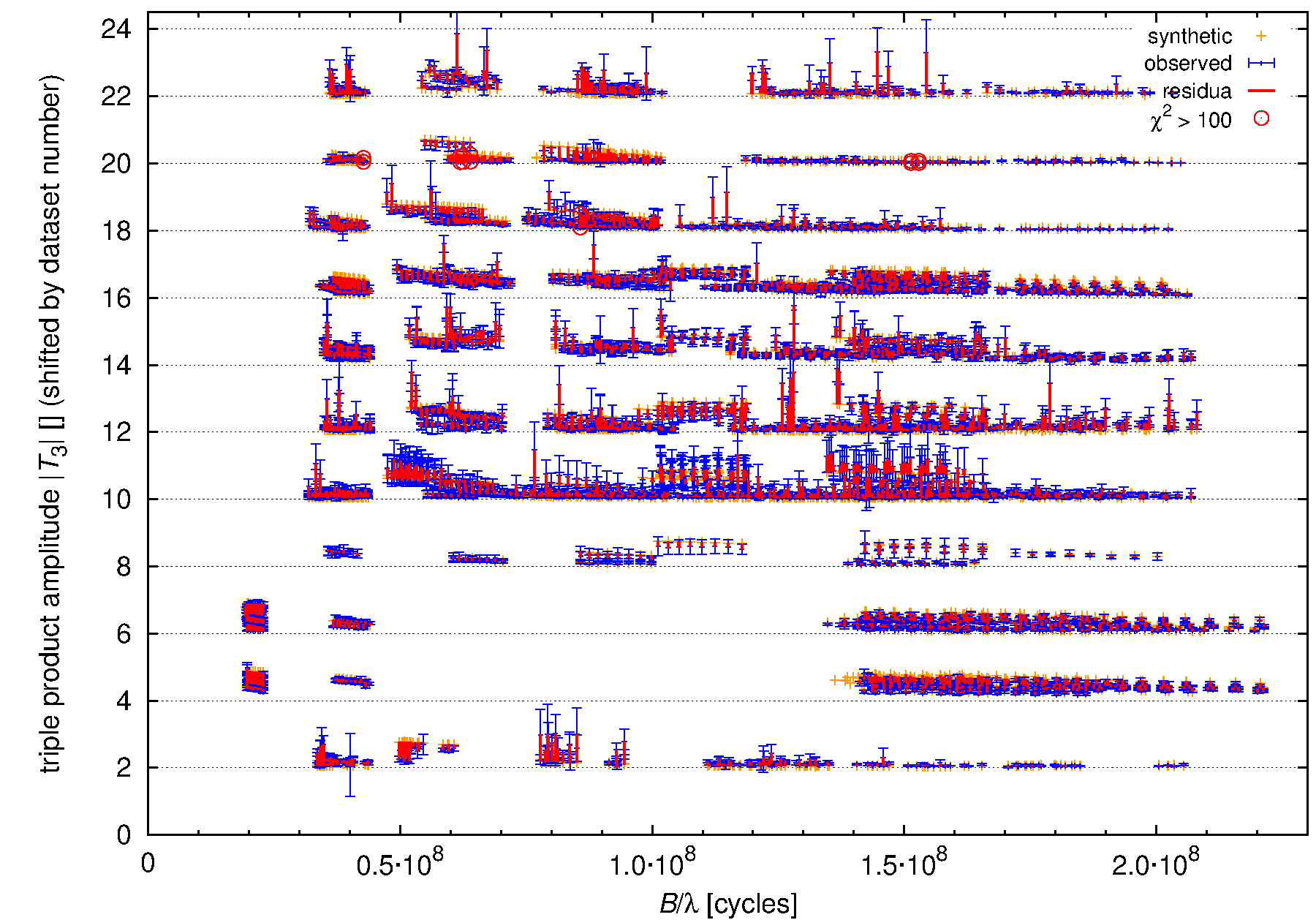
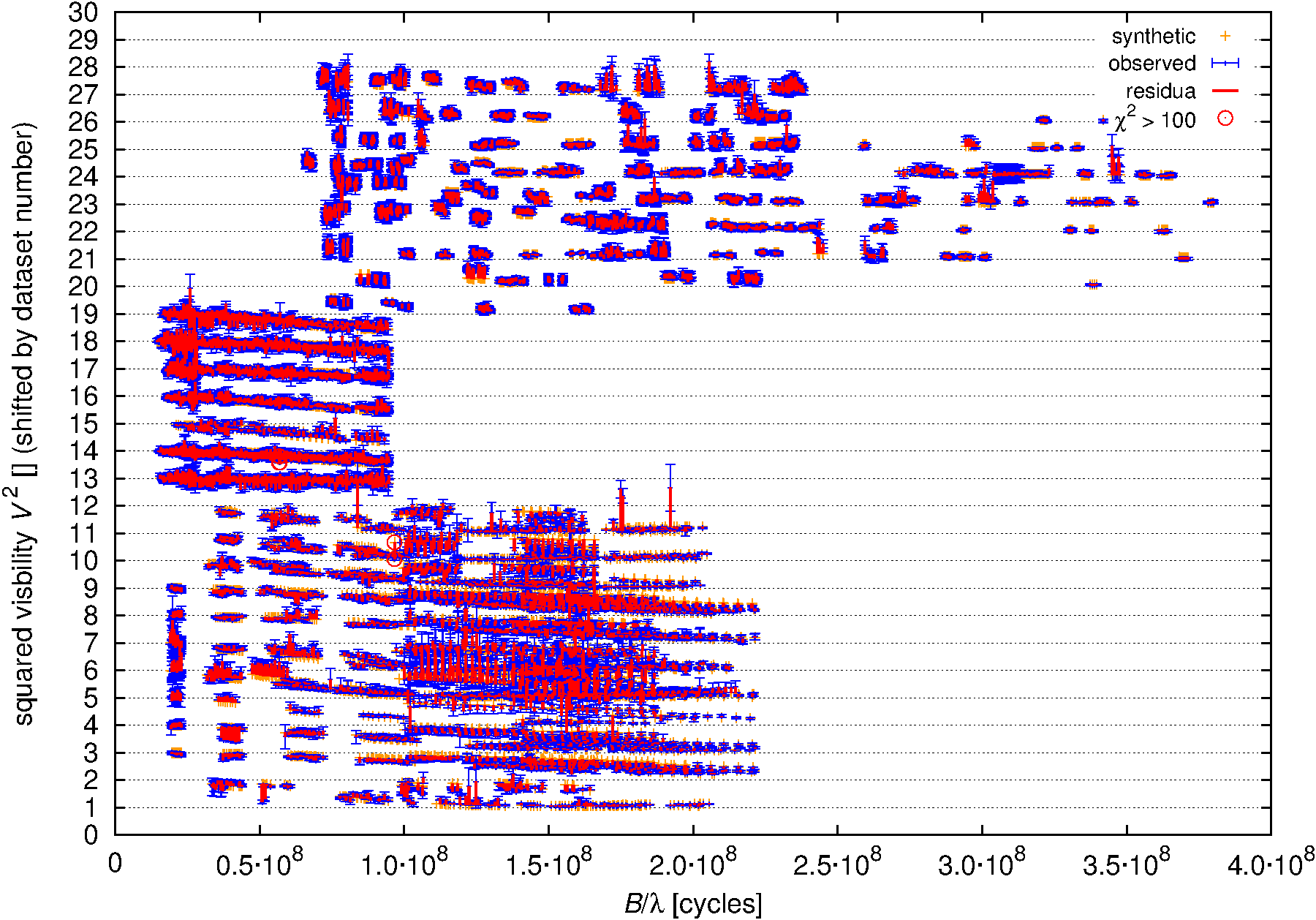
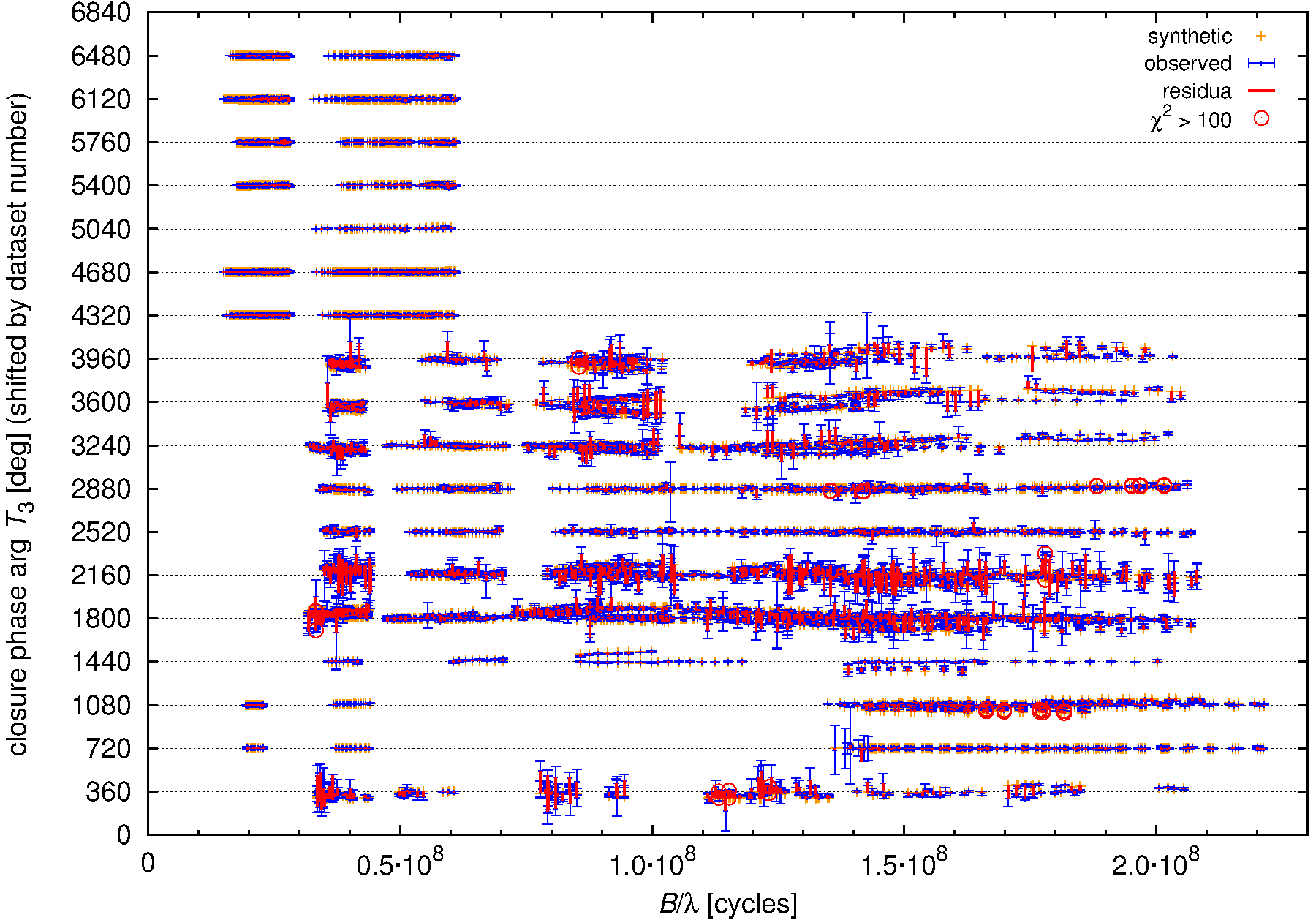
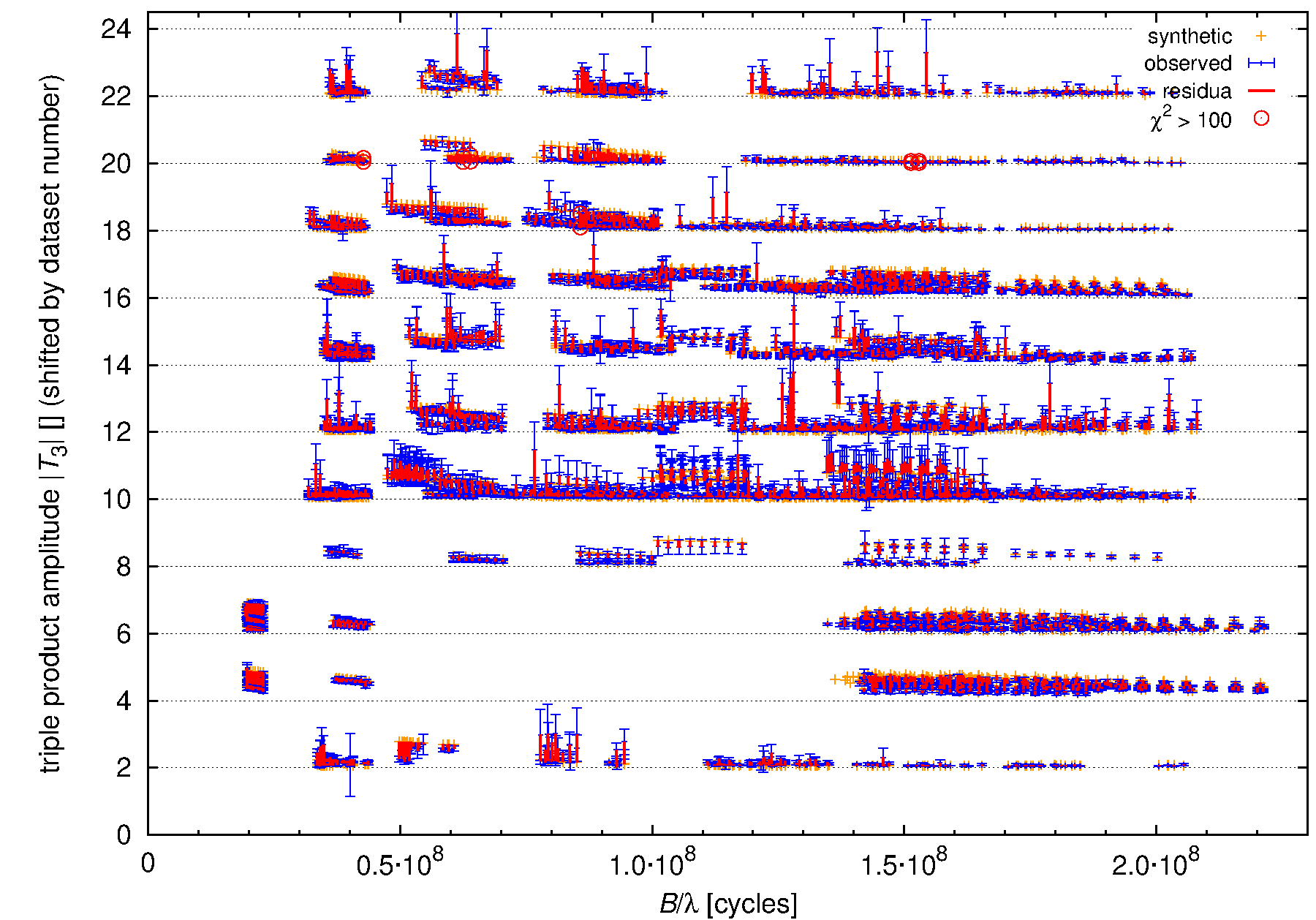
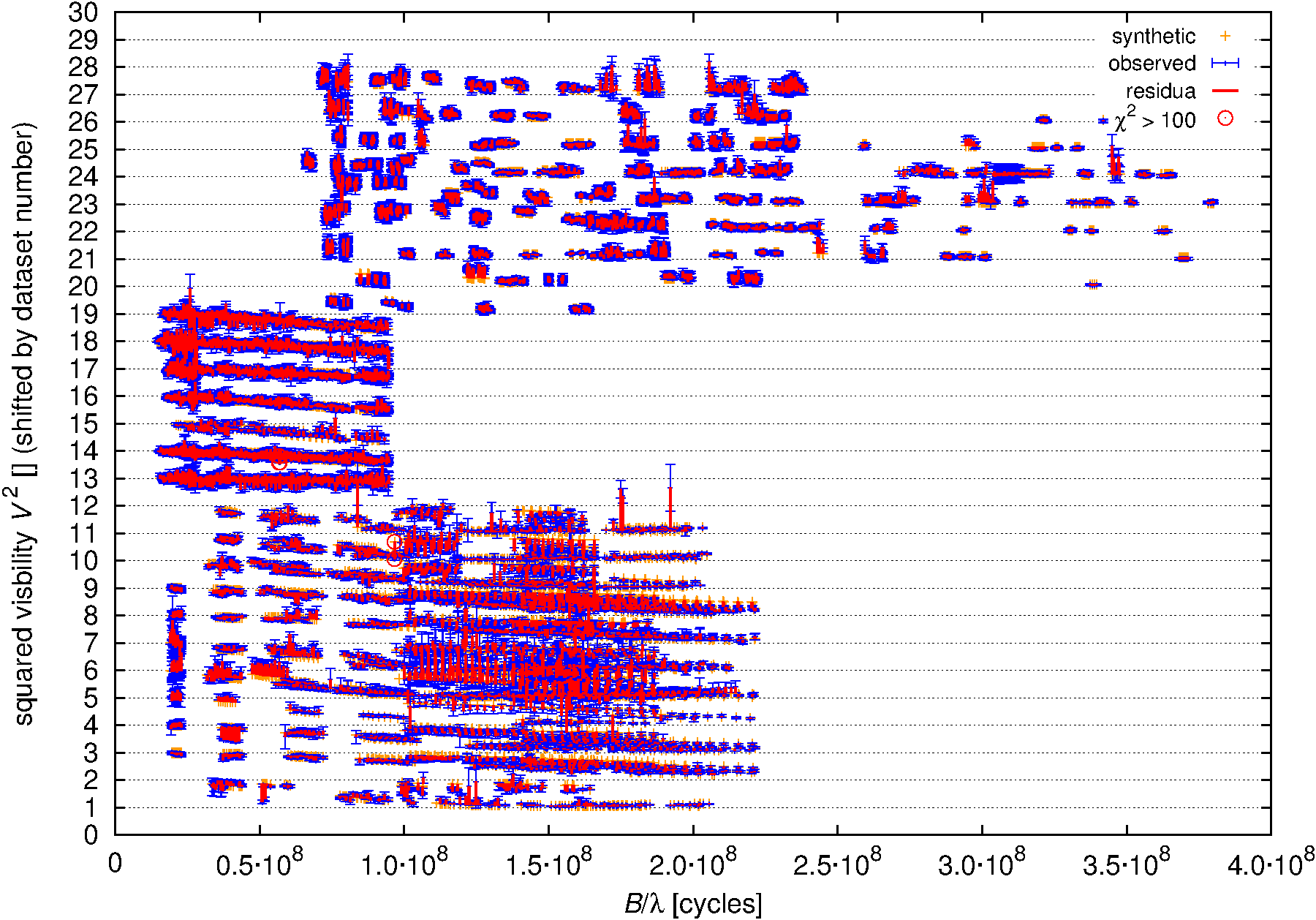
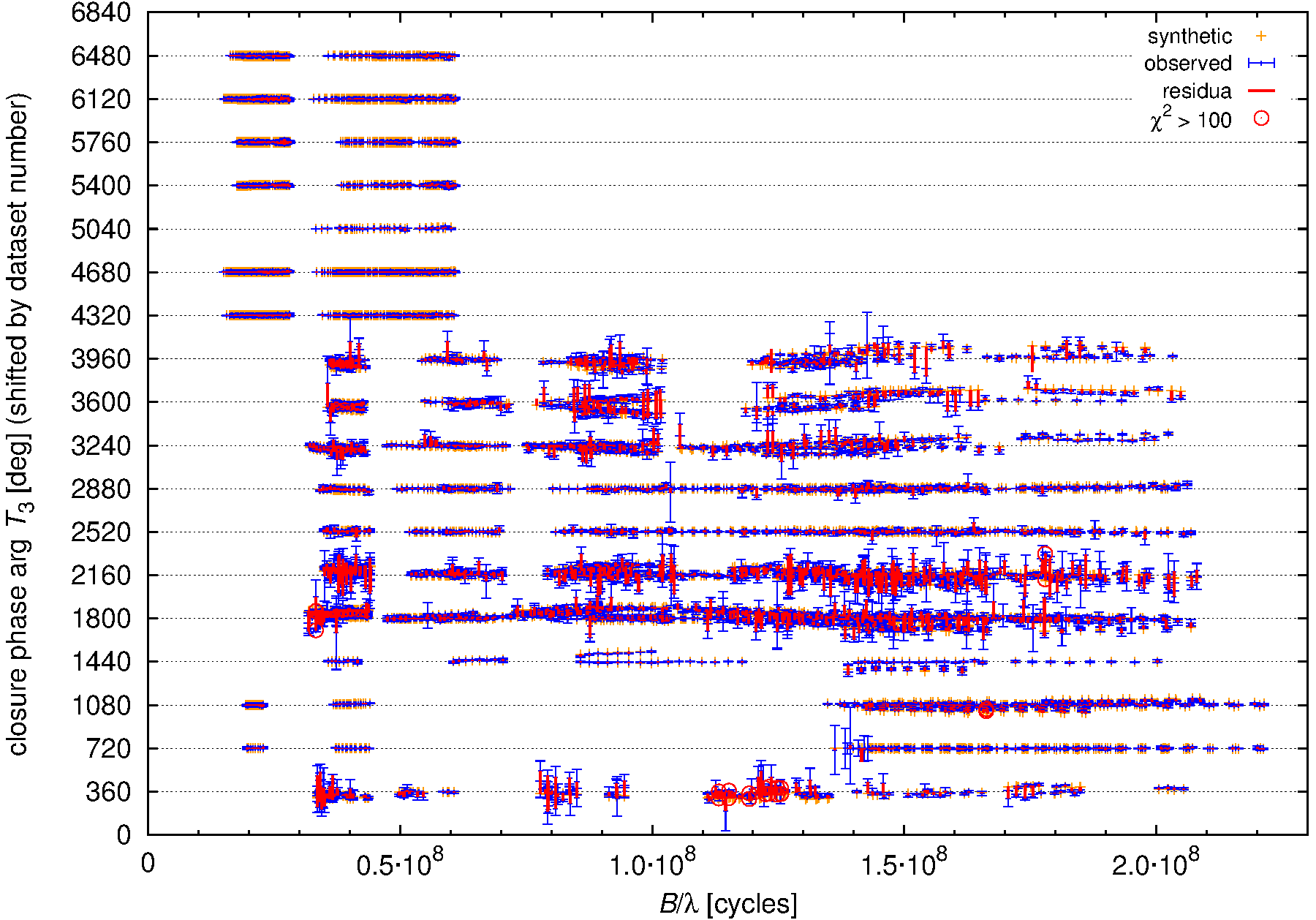
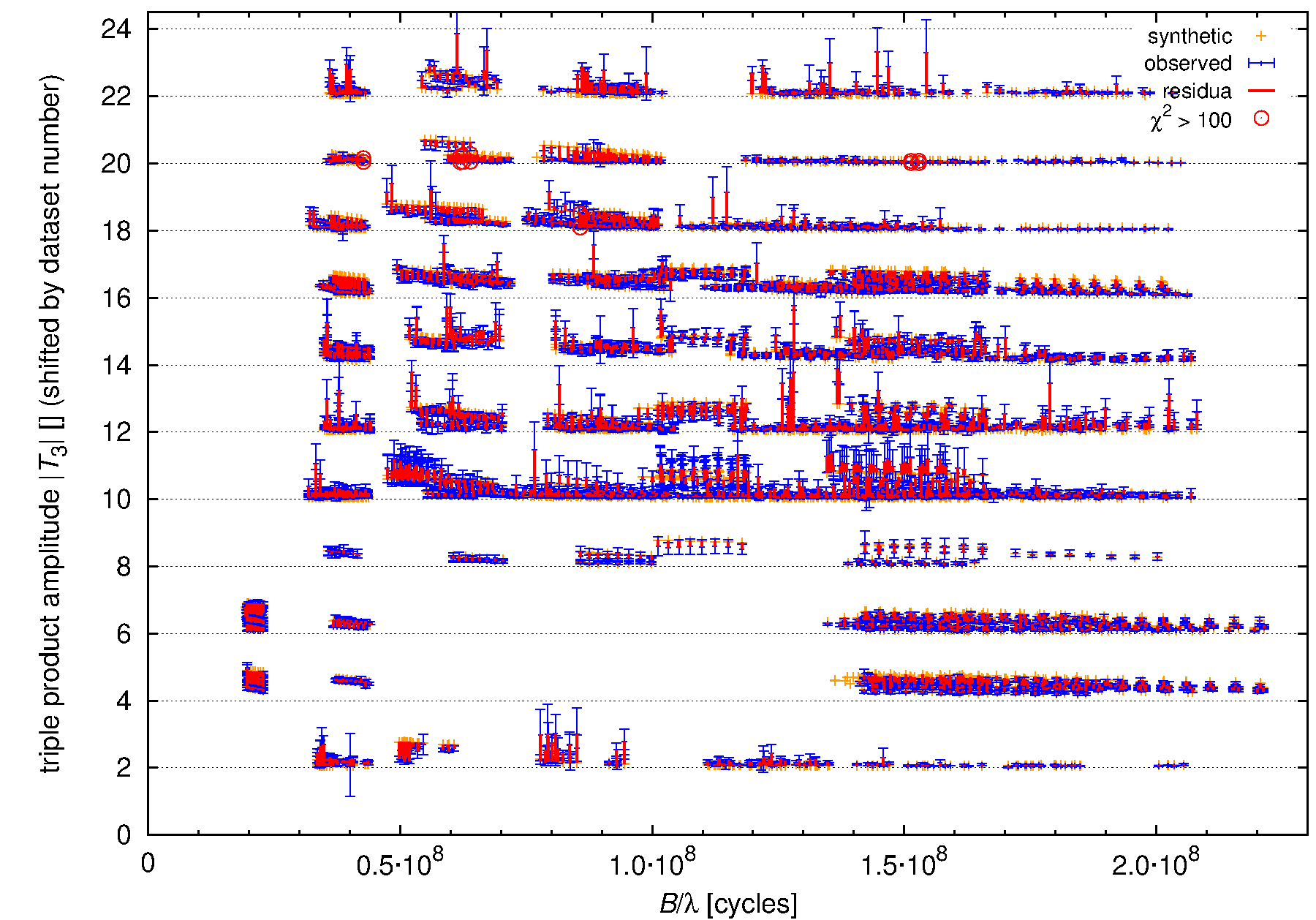
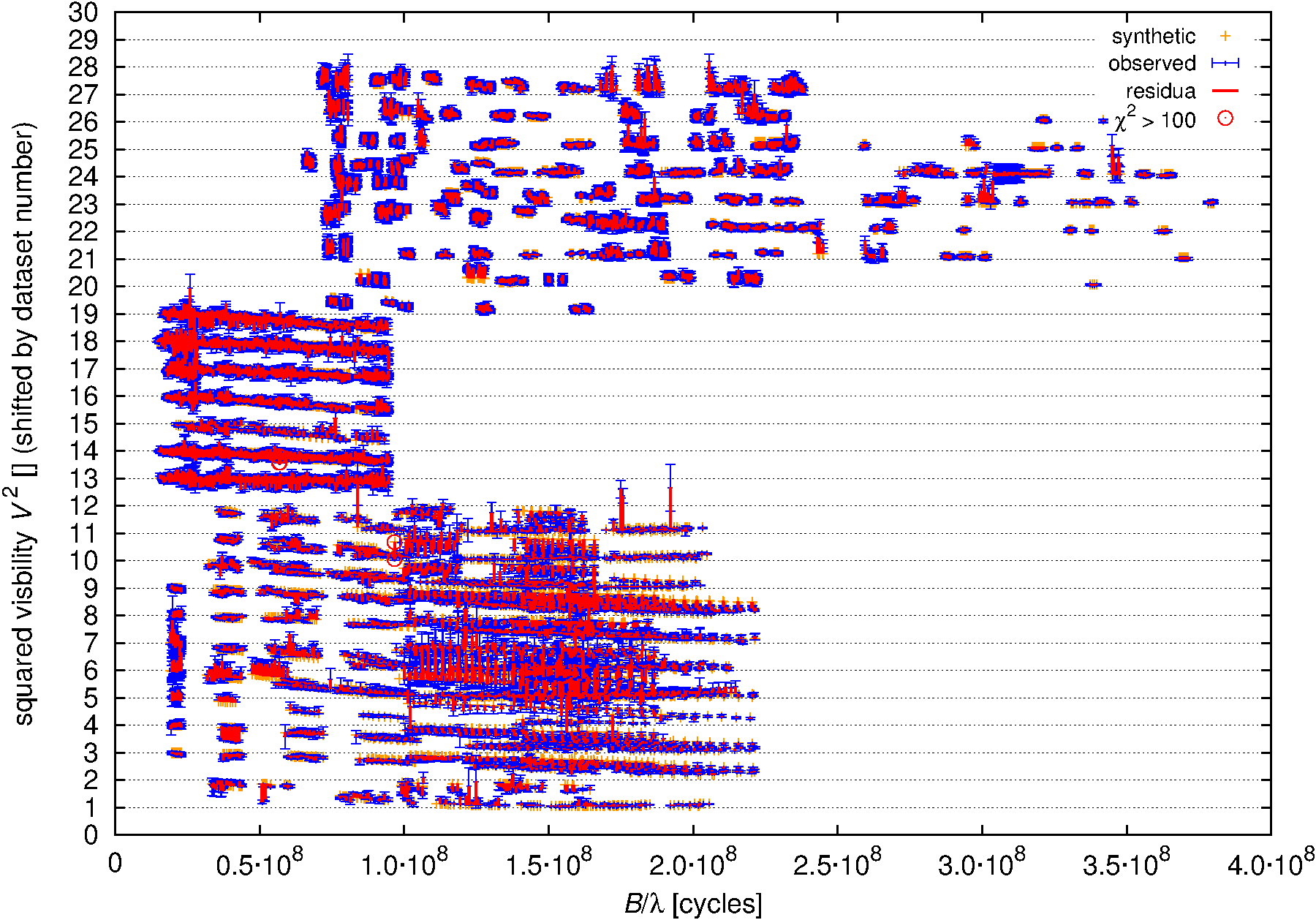
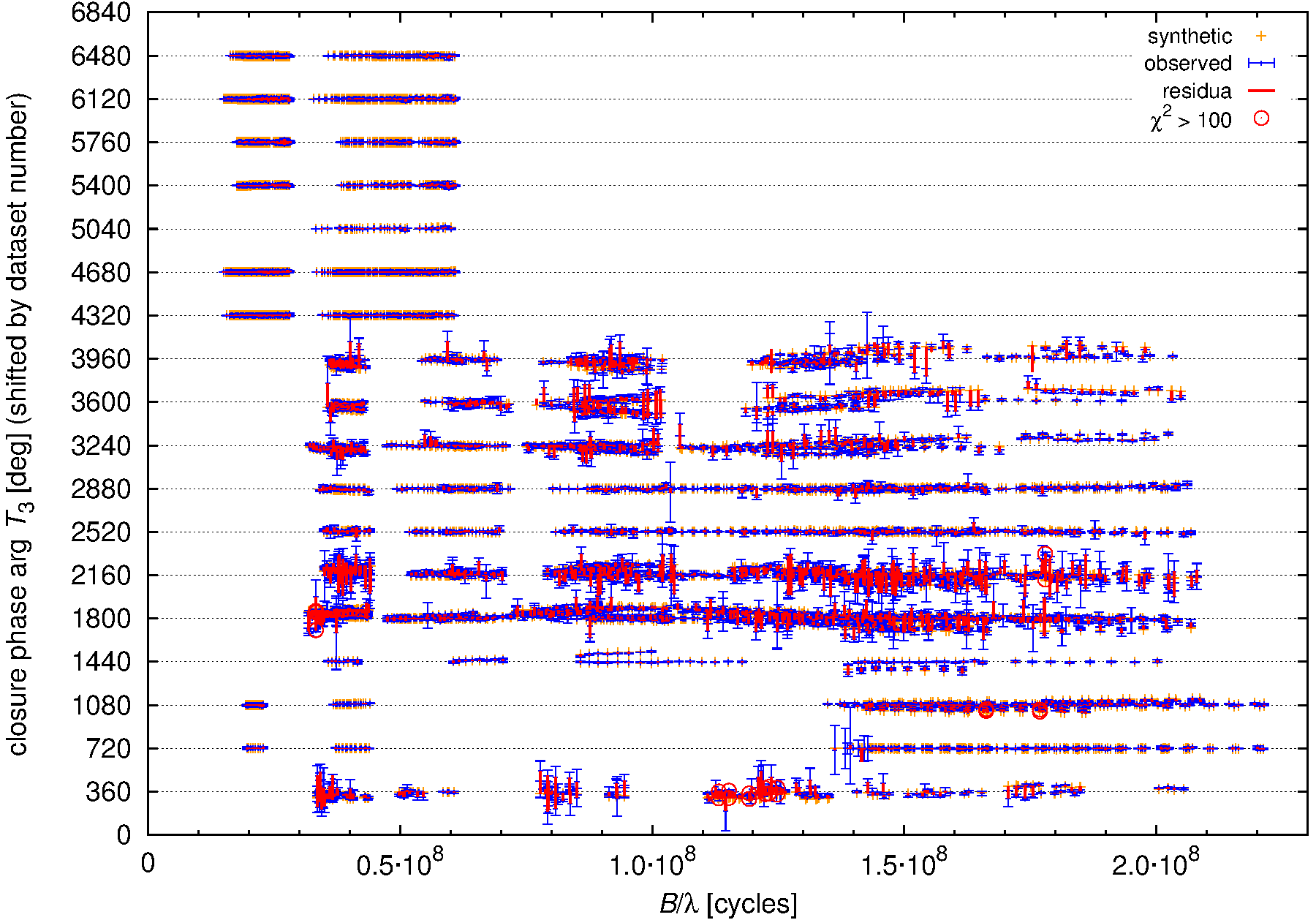
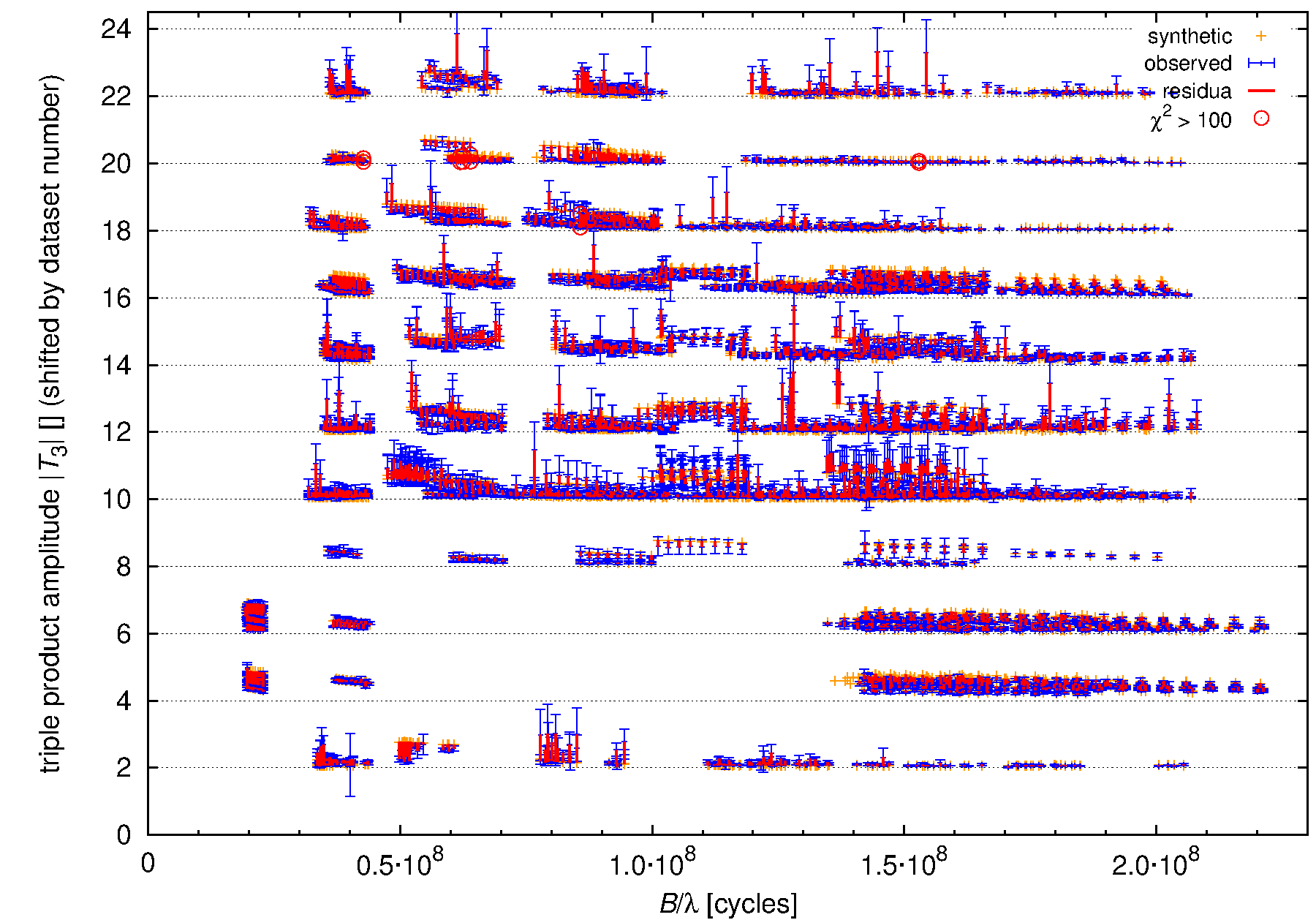
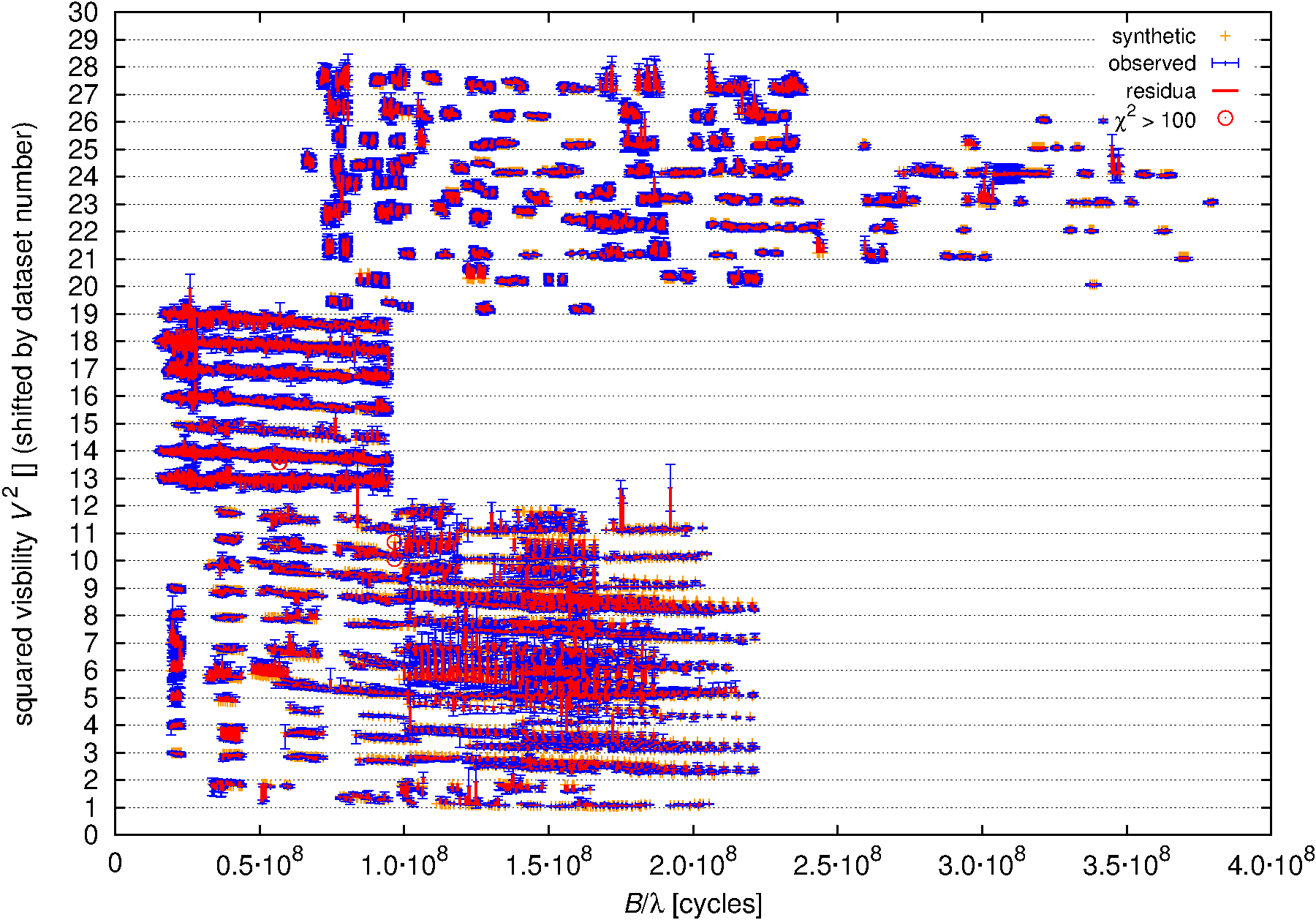
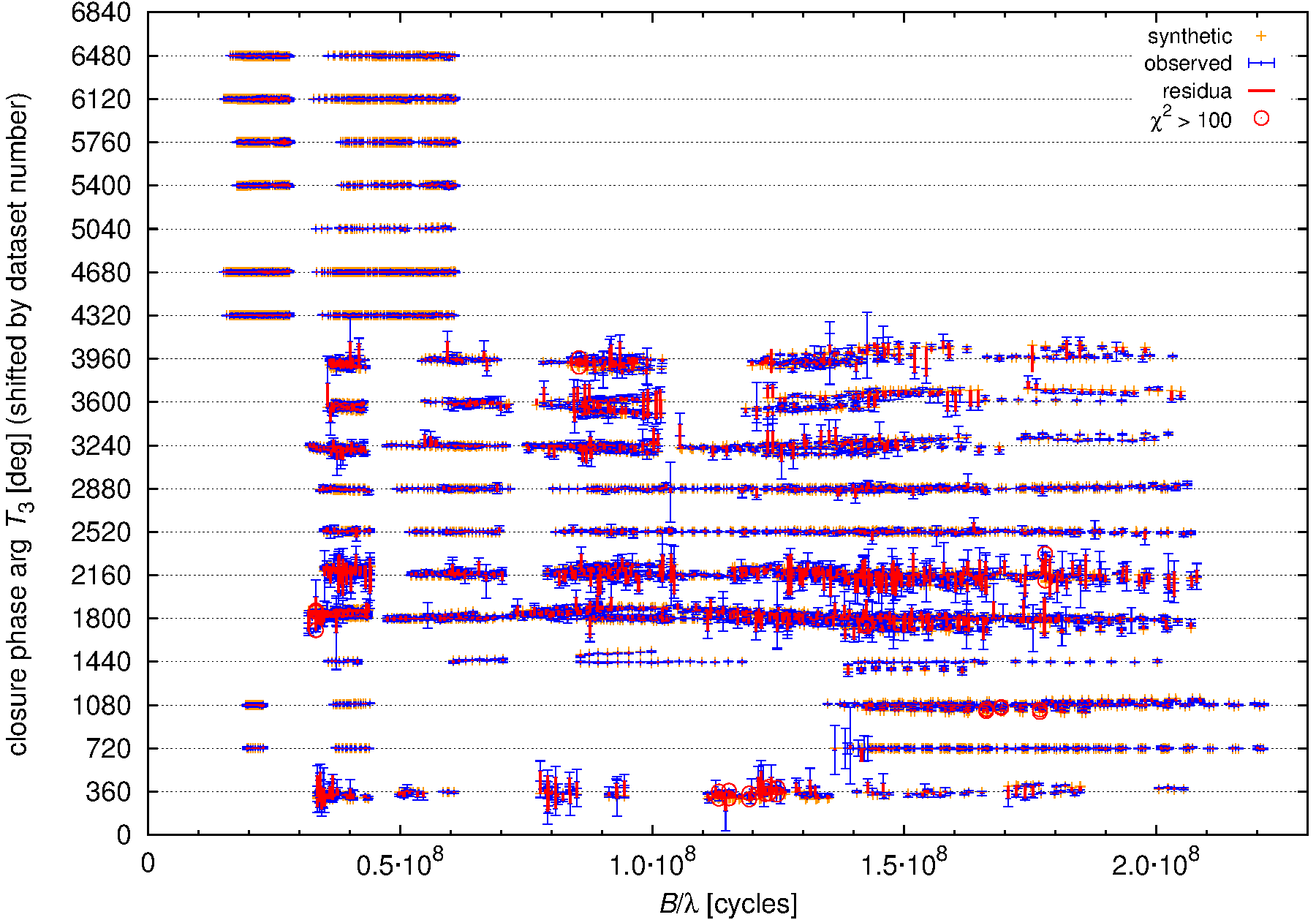
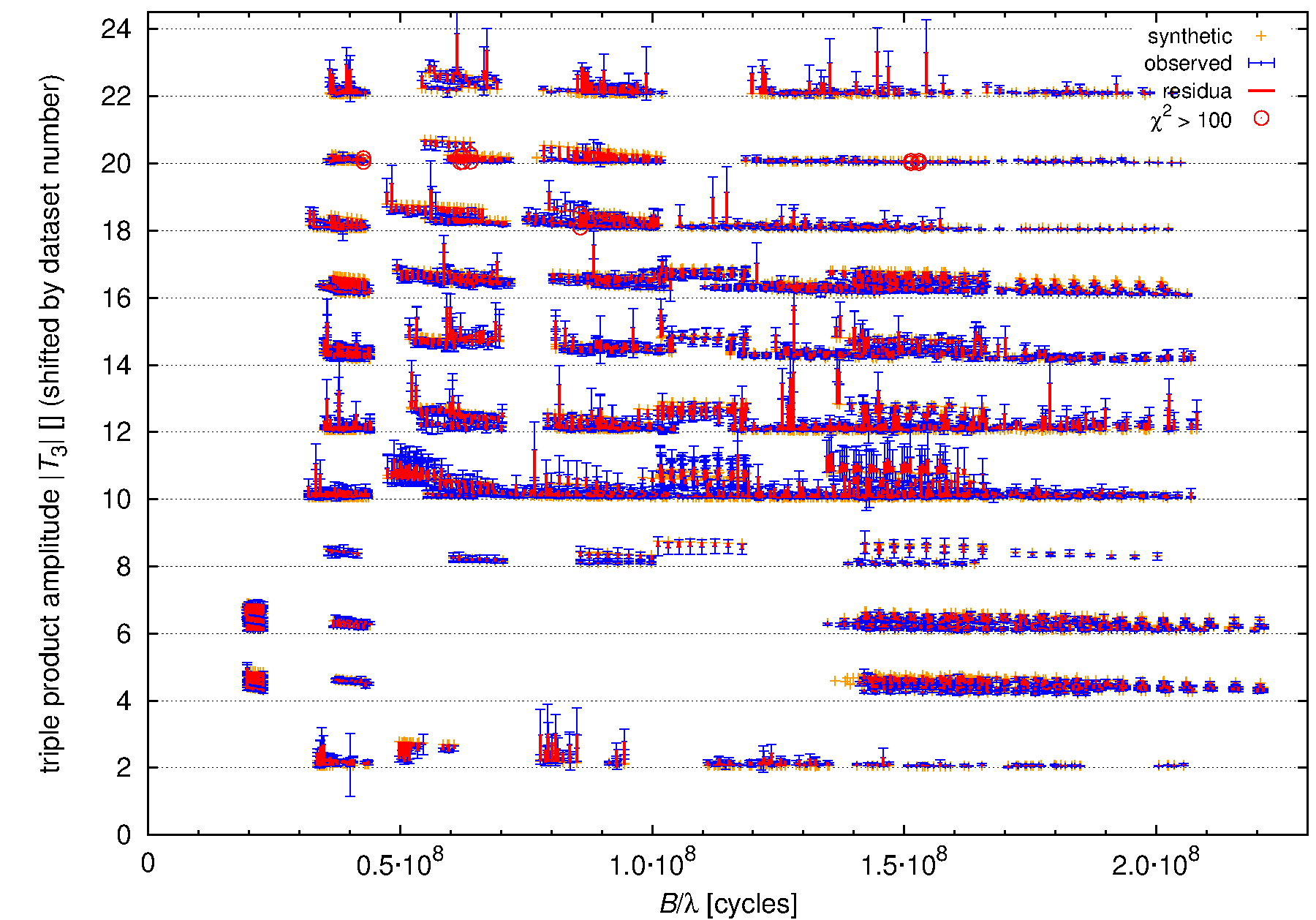
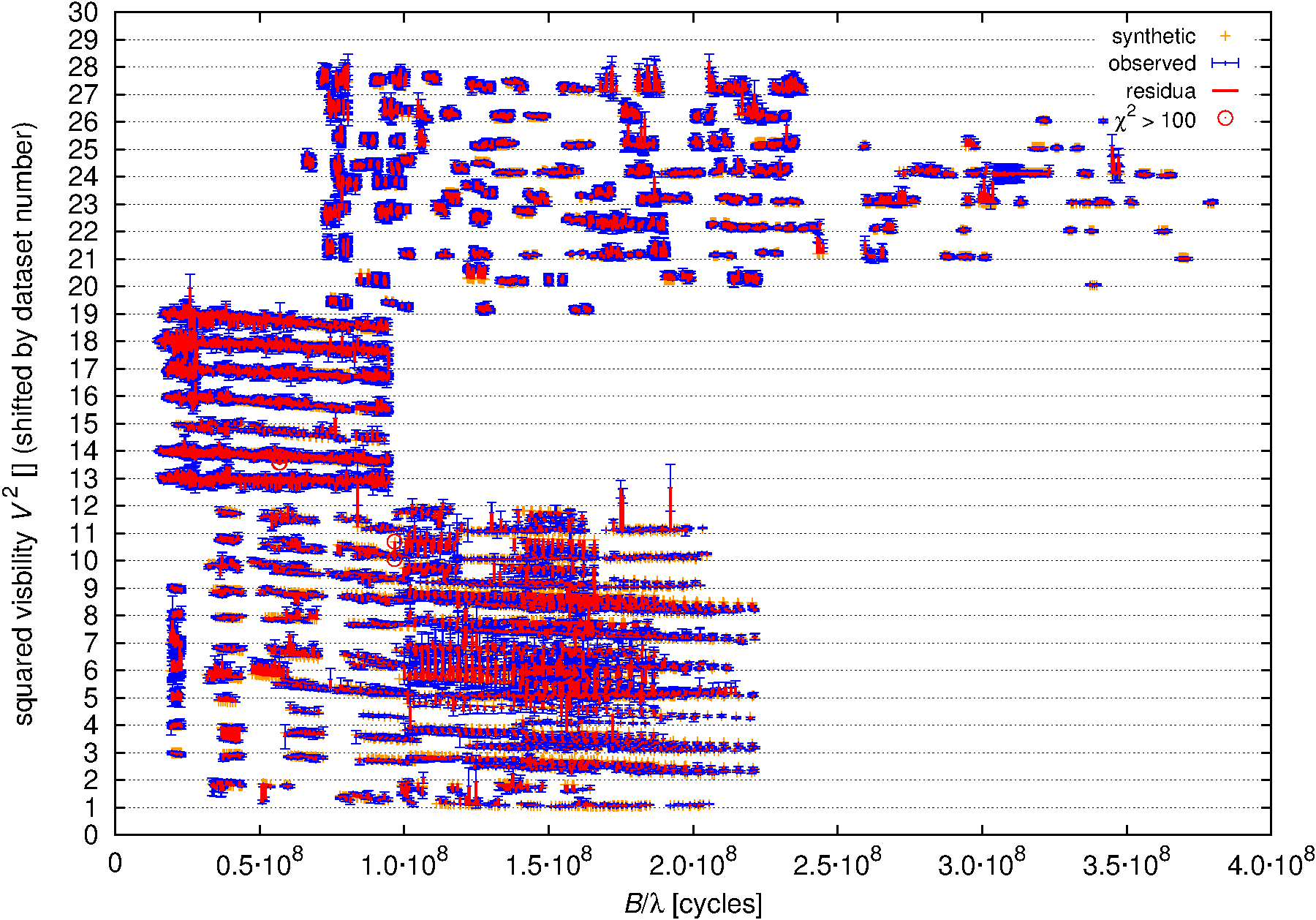
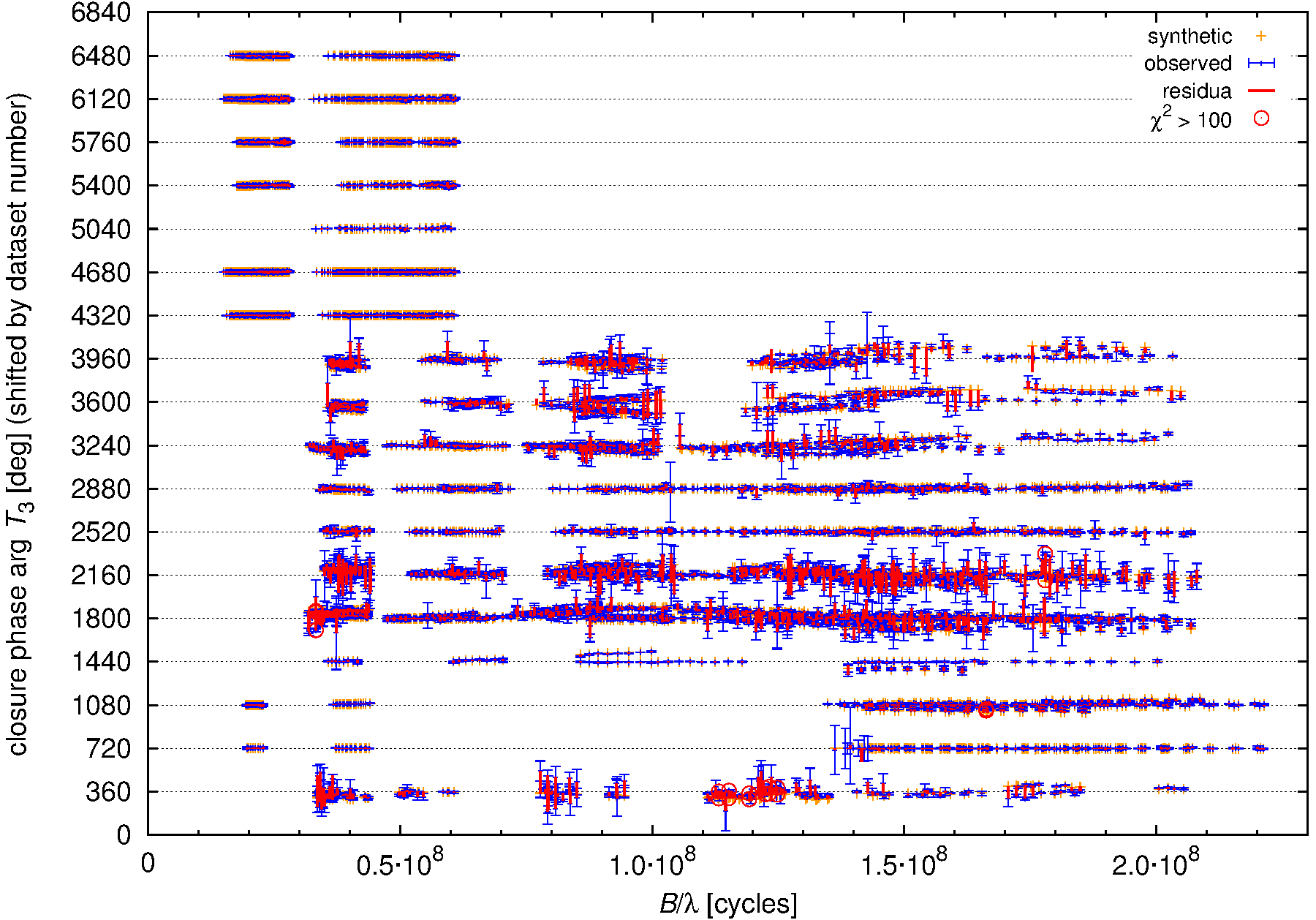
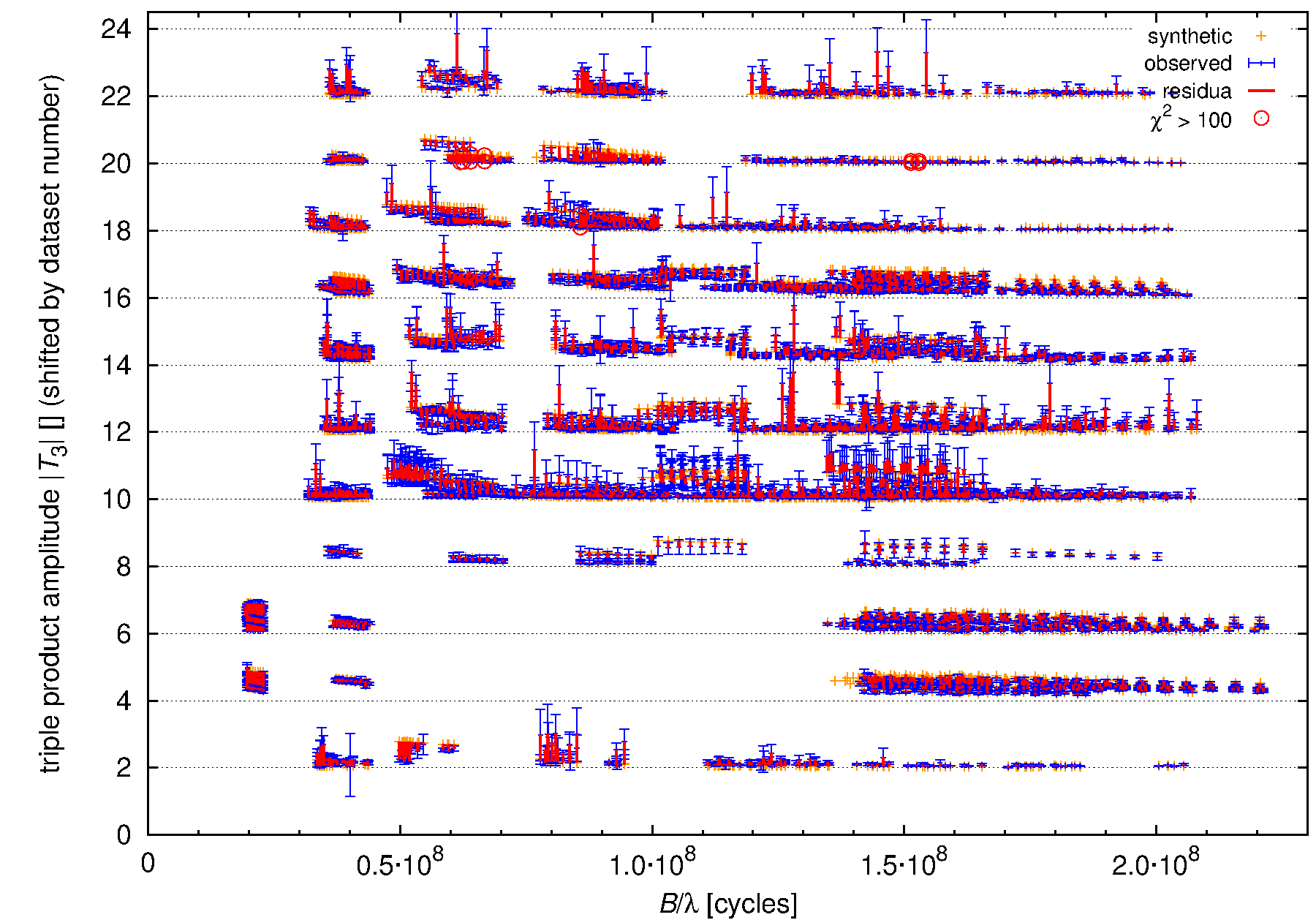
Best-fit χ2 plots (cf. remaining systematics):
| LC | VIS | CLO | T3 | ||
| slab power-law |  |
 |
 |
 |
shellspec.in |
| slab steady | 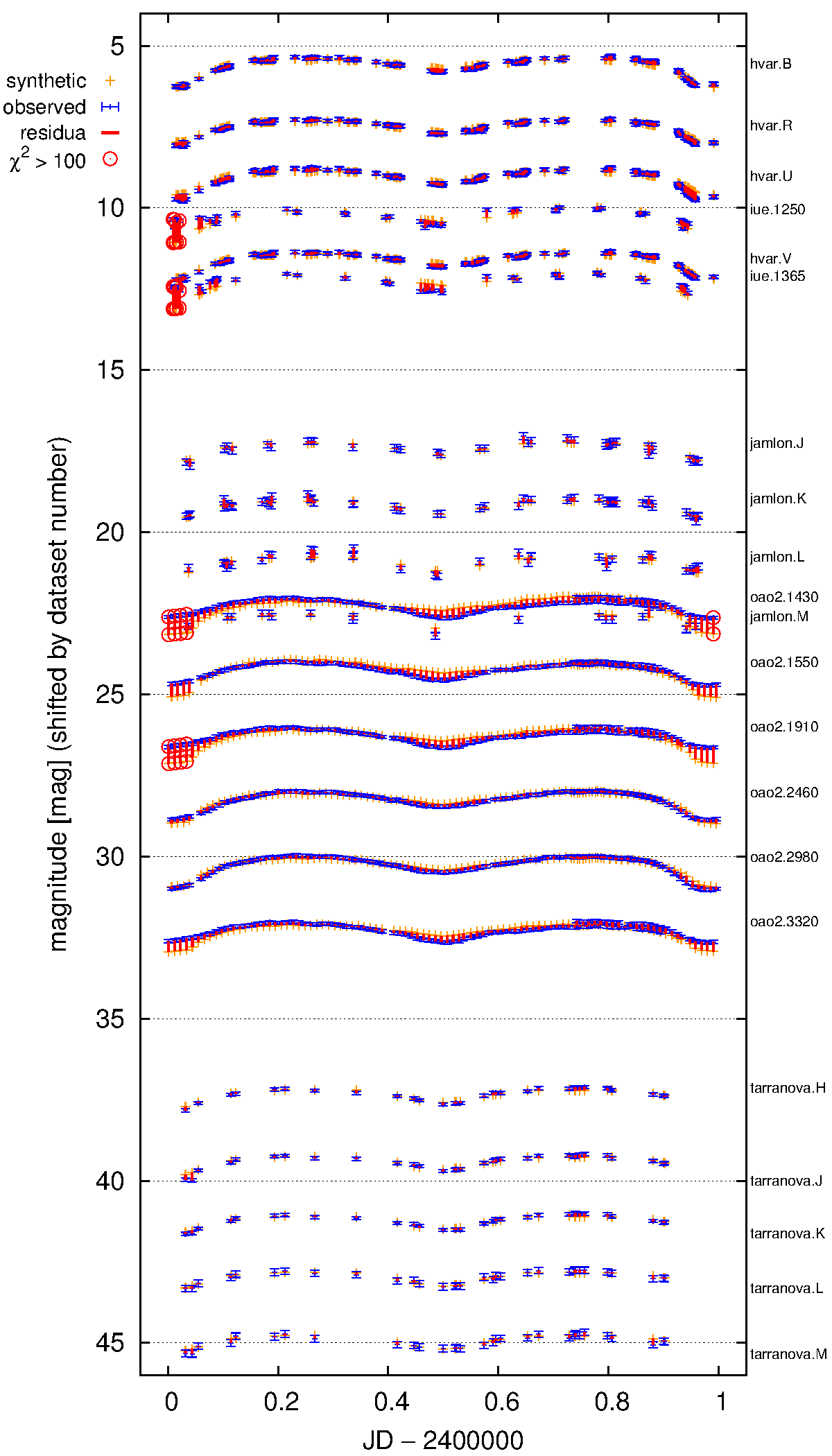 |
 |
 |
 |
shellspec.in |
| wedge power-law | 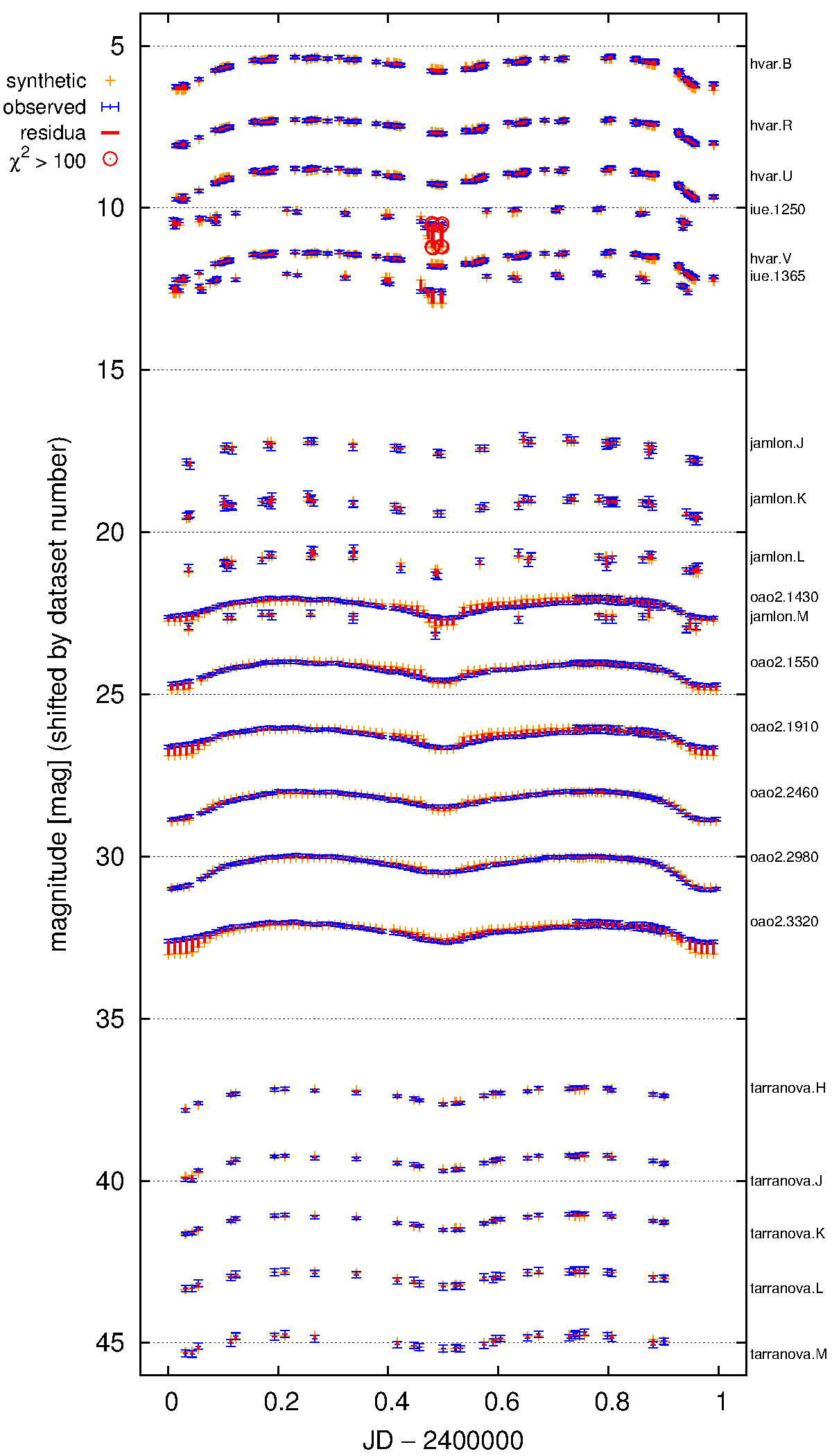 |
 |
 |
 |
shellspec.in |
| wedge steady | 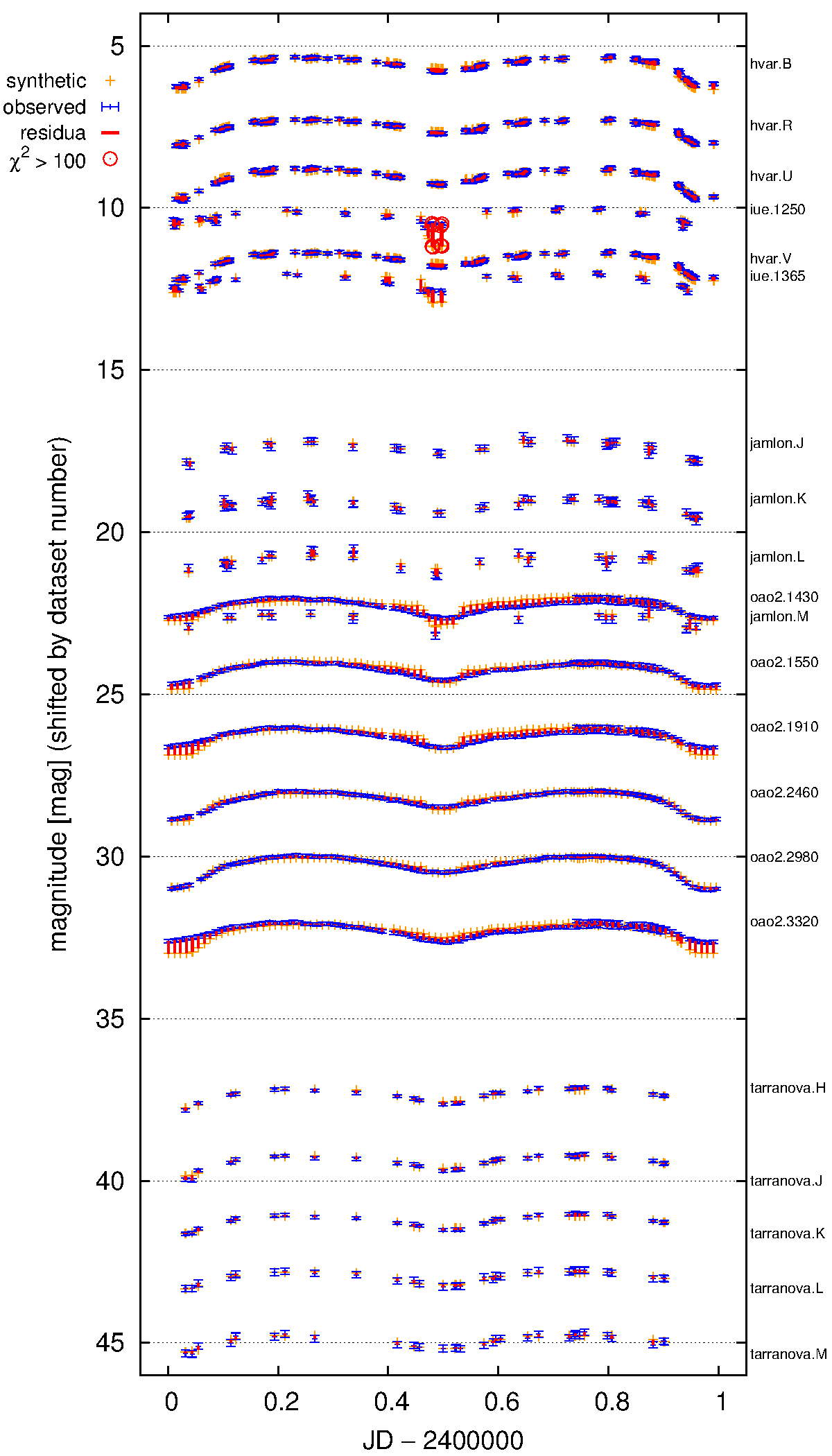 |
 |
 |
 |
shellspec.in |
| nebula LINES | 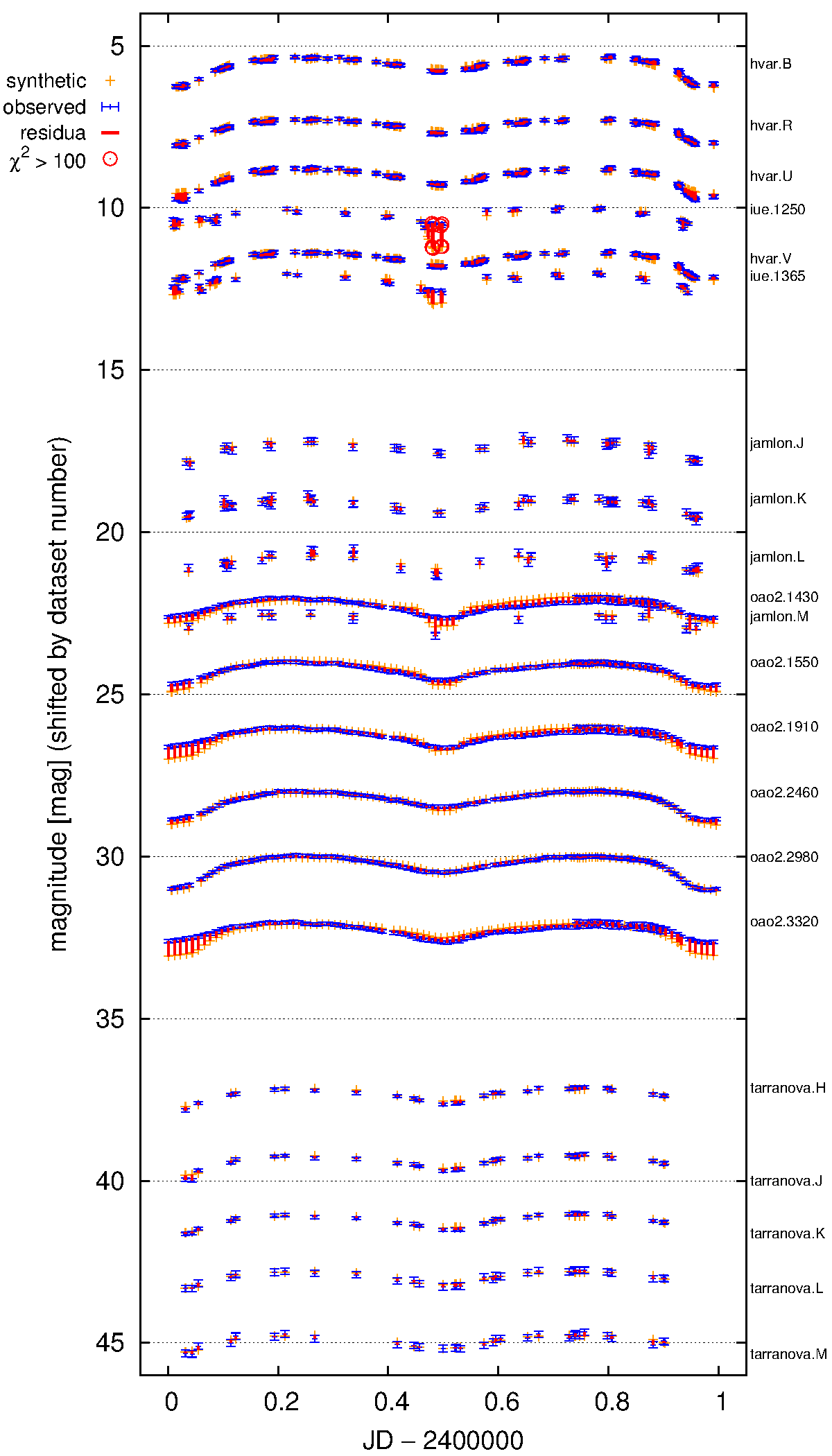 |
 |
 |
 |
shellspec.in |
| spot LIMCOF | 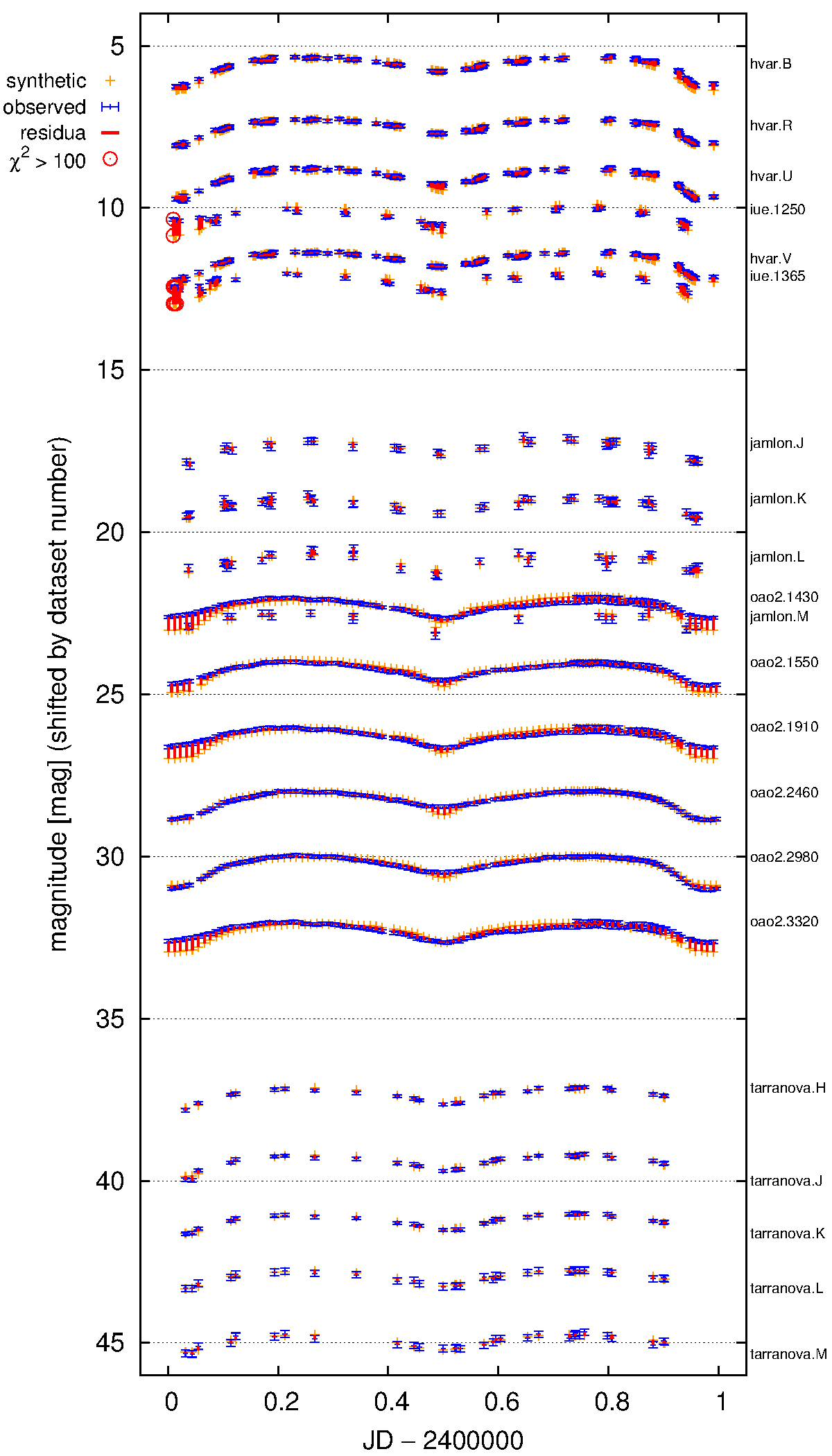 |
 |
 |
 |
shellspec.in |
Minimum-maximum range searched for by optimisation (differential-evolution, simplex):
| FUV | V | NIR | FIR | |
| slab power-law min. | 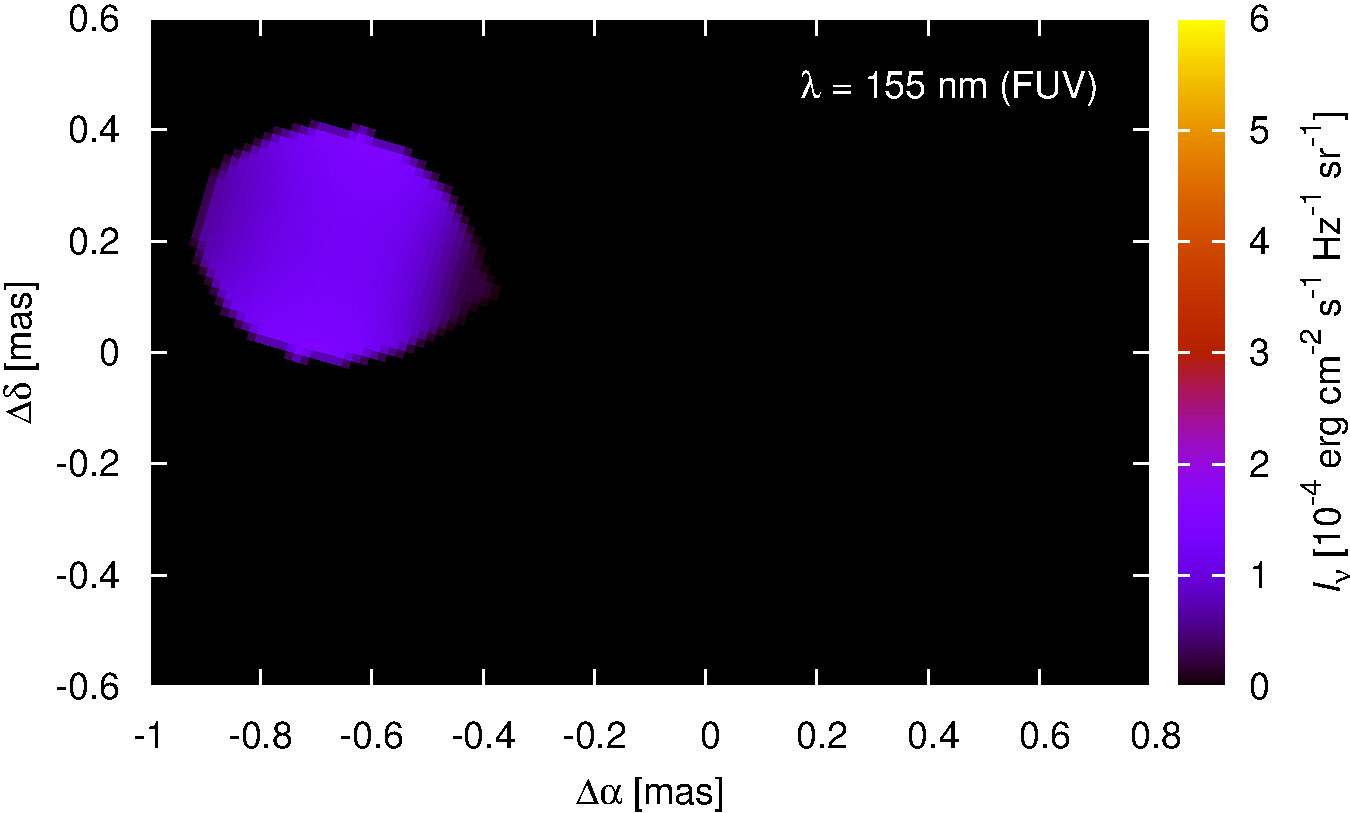 |
 |
 |
 |
| slab power-law max. | 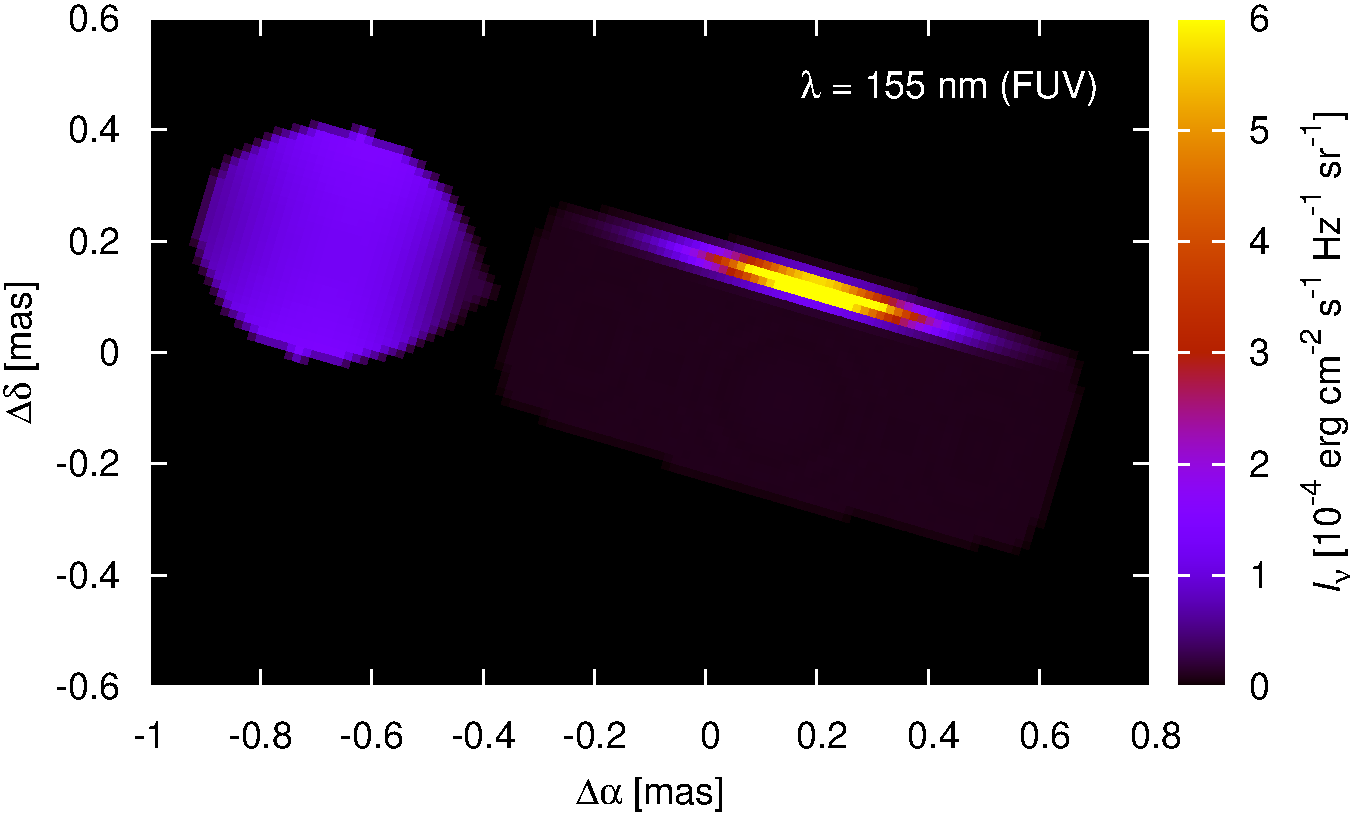 |
 |
 |
 |
| nebula min. | 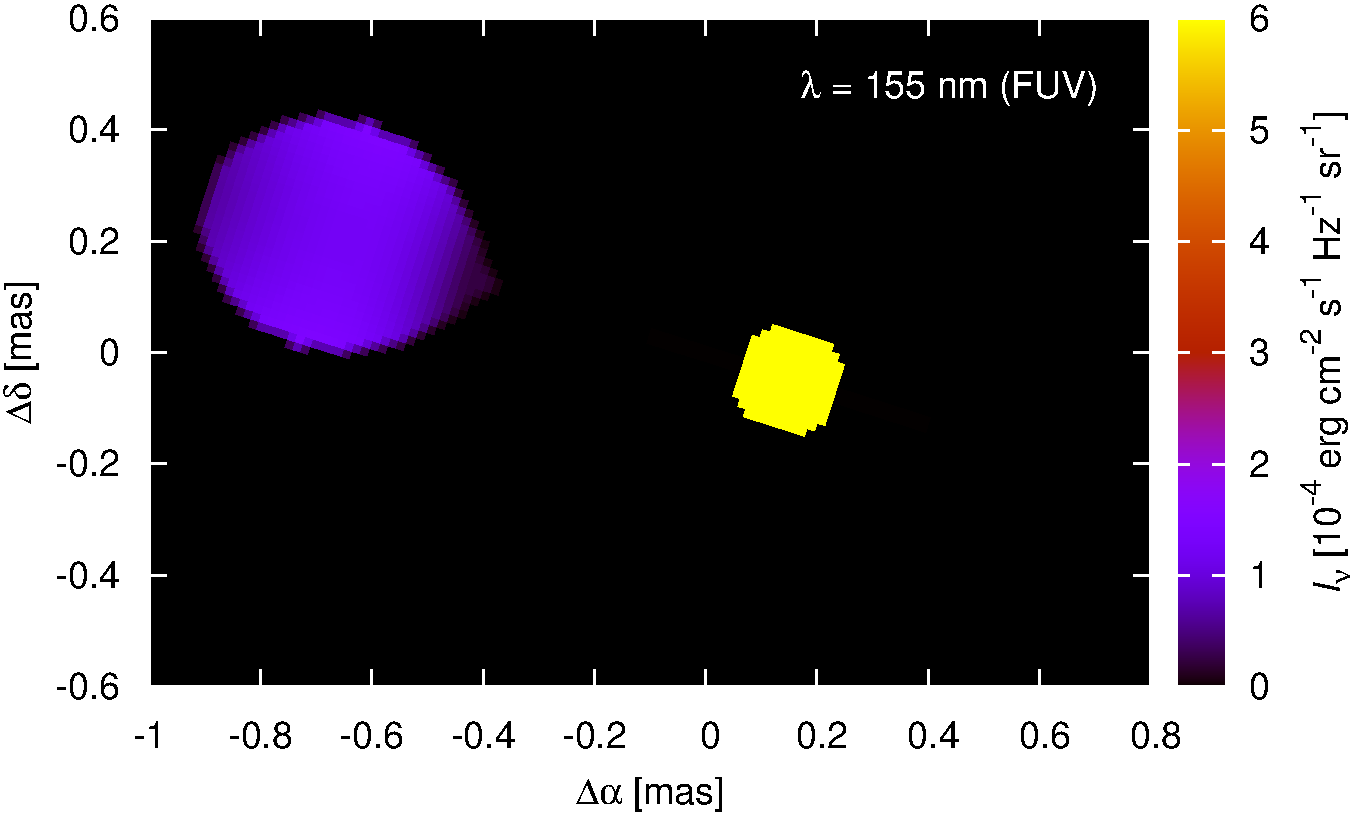 |
 |
 |
 |
| nebula max. | 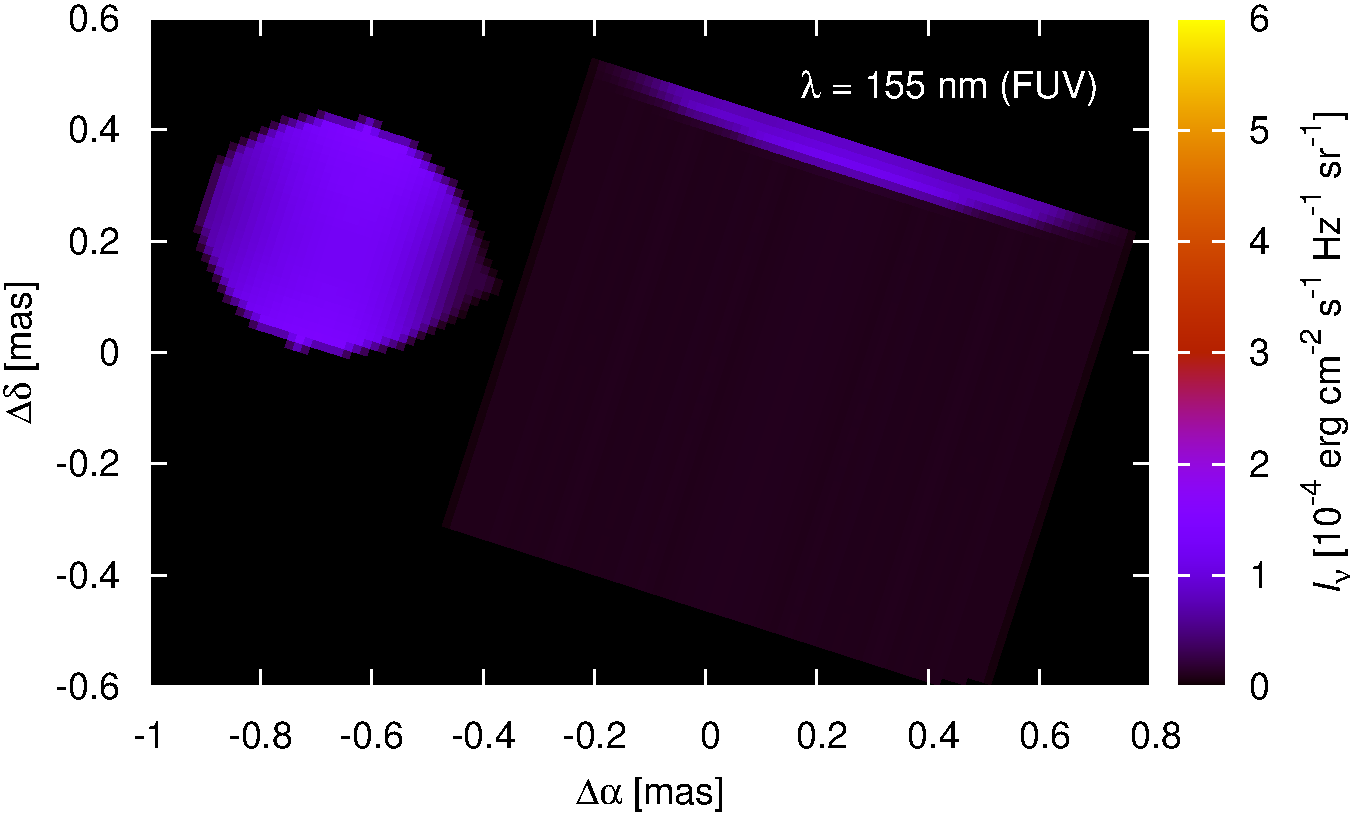 |
 |
 |
 |
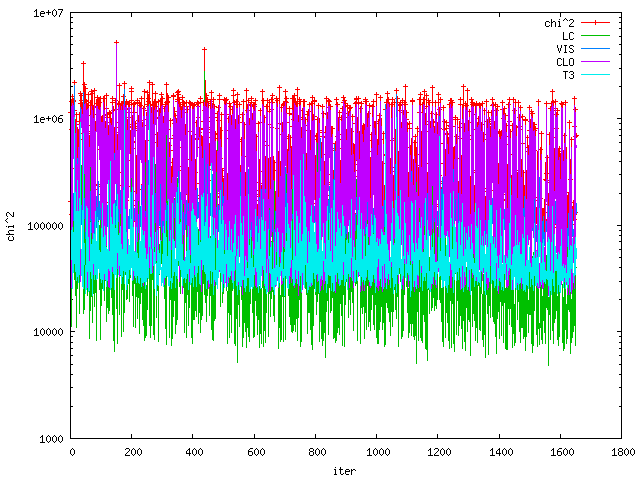
χ2 evolution during optimisation:
| differential evolution | simplex |
 |
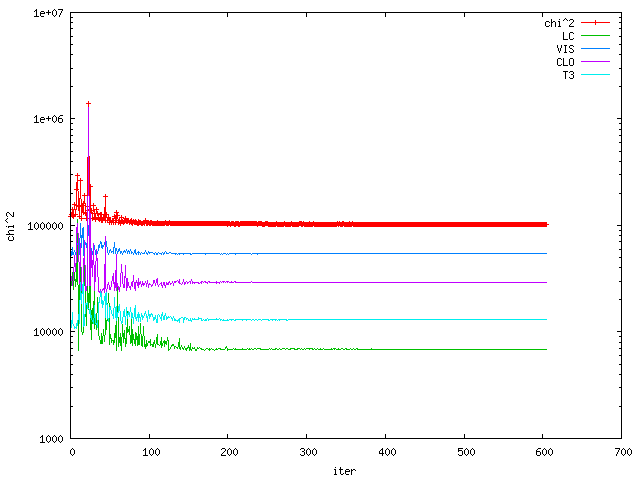 |
| A typical evolution of χ2 vs the number of iteration for a differential evolution (left), and simplex (right). Individual contributions to the χ2 are also indicated, where LC stands for the light curve, VIS the squared visibility, CLO the closure phase, and T3 the triple product amplitude. Pyshellspec enables to solve the inverse task by means of global and local optimisation of system parameters. For the differential evolution, there is no apparent convergence because the algorithm scans the allowed range of parameters. On the other hand, the simplex always shows a clear convergence to a local minimum, and one can check trade-off's between individual contributions (cf. LC and CLO which are sligthly decreased/increased). | |
Miroslav Brož (miroslav.broz@email.cz), Jul 27th 2020